基于ESP32的管道检修机器人:MQTT协议、SLAM技术栈设计流程
随着城市基础设施的发展,管道的检修与维护变得越来越重要。传统的人工检修方式不仅效率低下,还存在安全隐患。本项目旨在设计一款基于ESP32单片机的物联网管道检修机器人,集成先进的传感器、无线通信和人工智能技术,实现对管道的实时监测和故障检测。该机器人能够在复杂的管道环境中自主导航,进行视频监控,检测有害气体,并实时采集环境数据,从而提高检修效率和安全性,降低人力成本。SLAM 技术结合了传感器数据(
一、项目概述
项目目标和用途
随着城市基础设施的发展,管道的检修与维护变得越来越重要。传统的人工检修方式不仅效率低下,还存在安全隐患。本项目旨在设计一款基于ESP32单片机的物联网管道检修机器人,集成先进的传感器、无线通信和人工智能技术,实现对管道的实时监测和故障检测。该机器人能够在复杂的管道环境中自主导航,进行视频监控,检测有害气体,并实时采集环境数据,从而提高检修效率和安全性,降低人力成本。
技术栈关键词
-
ESP32单片机
-
无线通信(MQTT协议)
-
传感器(高清摄像头、气体传感器、温湿度传感器、超声波传感器)
-
SLAM(Simultaneous Localization and Mapping)技术
-
C/C++编程
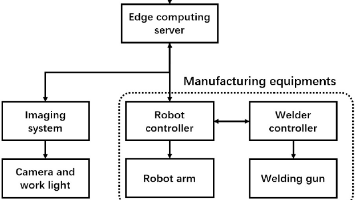
二、系统架构
系统架构设计
本系统分为以下几个主要模块:
-
传感器模块:集成高清摄像头、气体传感器、温湿度传感器和超声波传感器。
-
通信模块:使用ESP32进行无线通信,通过MQTT协议与云端平台进行数据传输。
-
导航模块:采用SLAM技术实现自主导航和路径规划。
-
控制模块:负责数据处理和机器人控制。
选择合适的单片机和通信协议
-
单片机:ESP32,具备强大的处理能力和Wi-Fi、蓝牙通信功能。
-
通信协议:MQTT,轻量级的消息协议,适合物联网应用。
-
传感器选择:
-
高清摄像头模块:用于实时视频监控。
-
气体传感器:用于检测管道内有害气体(如甲烷、氨气等)。
-
温湿度传感器:监测环境状态。
-
超声波传感器:用于测距和障碍物检测。
-
系统架构图
三、环境搭建和注意事项
环境搭建
-
硬件环境:
-
ESP32开发板
-
高清摄像头模块(如OV7670)
-
气体传感器(如MQ-2)
-
温湿度传感器(如DHT11)
-
超声波传感器(如HC-SR04)
-
电源模块(锂电池和太阳能板)
-
-
软件环境:
-
Arduino IDE或PlatformIO(用于C/C++编程)
-
MQTT Broker(如Mosquitto,用于处理消息)
-
云端平台(自己设计的监控平台)
-
注意事项
-
确保传感器的兼容性和准确性。
-
配置MQTT Broker的安全性,避免数据被非法访问。
-
测试机器人在不同管道环境中的稳定性和可靠性。
四、代码实现过程
在这一部分,我们将详细介绍物联网管道检修机器人的代码实现过程,涵盖各个功能模块的代码示例、流程及时序图。通过这些代码示例和注释,您将能够更好地理解每个模块的功能及其实现逻辑。
1. 传感器模块实现
传感器模块是机器人系统的核心部分,负责收集管道内的环境信息。我们将集成以下传感器:
-
高清摄像头(用于实时视频监控)
-
气体传感器(检测有害气体)
-
温湿度传感器(监测环境状态)
-
超声波传感器(用于测距和障碍物检测)
代码示例
以下是传感器模块的代码实现示例:
#include <WiFi.h>
#include <PubSubClient.h>
#include <DHT.h>
#include <HC_SR04.h>
#include <esp_camera.h>
// WiFi配置
const char* ssid = "YOUR_SSID";
const char* password = "YOUR_PASSWORD";
const char* mqtt_server = "YOUR_MQTT_BROKER";
// DHT传感器配置
#define DHTPIN 4 // DHT传感器连接引脚
#define DHTTYPE DHT11 // DHT11传感器
DHT dht(DHTPIN, DHTTYPE);
// 气体传感器配置
const int gasSensorPin = 34; // MQ-2引脚
// 超声波传感器配置
HC_SR04 ultrasonic(12, 13); // 超声波传感器Trig和Echo引脚
WiFiClient espClient;
PubSubClient client(espClient);
// 摄像头配置
void setupCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = 5;
config.pin_d1 = 18;
config.pin_d2 = 19;
config.pin_d3 = 21;
config.pin_d4 = 36;
config.pin_d5 = 39;
config.pin_d6 = 34;
config.pin_d7 = 35;
config.pin_xclk = 0;
config.pin_pclk = 22;
config.pin_vsync = 25;
config.pin_href = 23;
config.pin_sscb_sda = 26;
config.pin_sscb_scl = 27;
config.pin_pwdn = 32;
config.pin_reset = -1;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
config.frame_size = FRAMESIZE_SVGA;
config.jpeg_quality = 12;
config.fb_count = 2;
esp_camera_init(&config);
}
void setup() {
Serial.begin(115200);
setupCamera();
// WiFi连接
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
Serial.print(".");
}
Serial.println("WiFi connected");
client.setServer(mqtt_server, 1883);
dht.begin();
}
void loop() {
if (!client.connected()) {
reconnect();
}
client.loop();
// 读取传感器数据
float temperature = dht.readTemperature();
float humidity = dht.readHumidity();
int gasLevel = analogRead(gasSensorPin);
long distance = ultrasonic.read();
// 将数据发送到MQTT
String payload = String("{\"temperature\":") + temperature +
String(",\"humidity\":") + humidity +
String(",\"gasLevel\":") + gasLevel +
String(",\"distance\":") + distance + "}";
client.publish("pipe_monitor/sensors", payload.c_str());
// 摄像头拍照
camera_fb_t *fb = esp_camera_fb_get();
if (fb) {
client.publish("pipe_monitor/camera", fb->buf, fb->len);
esp_camera_fb_return(fb);
}
delay(5000); // 每5秒读取一次数据
}
void reconnect() {
while (!client.connected()) {
Serial.print("Attempting MQTT connection...");
if (client.connect("PipeRobotClient")) {
Serial.println("connected");
} else {
Serial.print("failed, rc=");
Serial.print(client.state());
delay(2000);
}
}
}
代码解析
-
WiFi连接:通过
WiFi.begin()函数连接到指定的Wi-Fi网络,同时在连接过程中通过串口输出连接状态。 -
传感器数据读取:在
loop()函数中,我们每5秒读取一次传感器数据,包括温度、湿度、气体浓度和超声波测距数据。 -
MQTT 发布:将读取到的数据格式化为 JSON 格式,并通过 MQTT 协议发送到指定的主题(如
"pipe_monitor/sensors"),便于云端接收和分析。 -
摄像头拍照:使用
esp_camera_fb_get()函数获取图像帧并将其发布到 MQTT 主题(如"pipe_monitor/camera"),以进行实时监控。
2. 通信模块实现
通信模块负责与云端平台进行数据交换。我们使用 MQTT 协议来实现轻量级和高效的数据传输。
代码示例
下面的代码片段演示了如何通过 MQTT 发送传感器数据和接收控制指令:
// MQTT 相关代码(已在传感器模块中包含)
void setup() {
// 其他初始化代码...
// 订阅控制主题
client.subscribe("pipe_monitor/control");
}
void callback(char* topic, byte* payload, unsigned int length) {
// 处理接收到的控制指令
String message;
for (int i = 0; i < length; i++) {
message += (char)payload[i];
}
if (String(topic) == "pipe_monitor/control") {
Serial.print("Control command received: ");
Serial.println(message);
// 根据收到的指令进行相应操作
if (message == "START") {
// 启动机器人
startRobot();
} else if (message == "STOP") {
// 停止机器人
stopRobot();
}
}
}
void loop() {
if (!client.connected()) {
reconnect();
}
client.loop();
// 其他代码...
}
代码解析
-
订阅控制主题:在
setup()中调用client.subscribe()函数订阅控制主题,允许机器人接收来自云端的控制指令。 -
处理指令:通过
callback()函数处理接收到的消息。根据消息内容(如"START"、"STOP")执行相应的操作,如启动或停止机器人。
3. 导航模块实现
导航模块使用 SLAM(Simultaneous Localization and Mapping)技术。由于复杂的管道环境,SLAM 可以帮助机器人在未知环境中实现实时定位和地图构建。
SLAM 技术概述
SLAM 技术结合了传感器数据(如激光雷达、超声波传感器等)来创建环境地图,并实时更新机器人的位置。这一过程通常包括以下步骤:
-
传感器数据采集
-
特征提取与匹配
-
位姿估计
-
地图更新
在实际实现中,我们可以使用一些开源库(如 ROS、OpenSLAM)来简化 SLAM 的实现,或使用 ESP32 的计算能力实现基本的路径规划。
代码示例
以下是 SLAM 的基本实现框架:
#include <SLAM.h>
SLAM slam;
void setup() {
// 其他初始化代码...
slam.initialize(); // 初始化SLAM
}
void loop() {
// 获取传感器数据
long distance = ultrasonic.read();
// 将数据传递给SLAM算法
slam.update(distance);
// 获取当前位姿
Position currentPosition = slam.getCurrentPosition();
// 发送位置信息到云端
String positionPayload = String("{\"x\":") + currentPosition.x +
String(",\"y\":") + currentPosition.y + "}";
client.publish("pipe_monitor/position", positionPayload.c_str());
delay(100); // 更新频率
}
代码解析
-
SLAM 初始化:在
setup()中调用slam.initialize()初始化 SLAM 模块。 -
数据更新:在
loop()中获取超声波传感器数据并调用slam.update()更新 SLAM 状态。 -
发布位置:获取当前位置信息并以 JSON 格式发布到云端,便于后续的可视化和监控。
4. 控制模块实现
控制模块不仅负责机器人的运动控制,还需要处理来自传感器的数据,并根据这些数据做出决策。控制模块的主要任务包括:
-
接收传感器数据。
-
根据数据判断机器人的状态(如是否需要避障、是否需要改变路径等)。
-
控制机器人的运动(前进、后退、转向等)。
代码示例
以下是控制模块的实现示例:
#include <Servo.h>
Servo leftMotor; // 左电机
Servo rightMotor; // 右电机
void setup() {
// 其他初始化代码...
leftMotor.attach(9); // 左电机控制引脚
rightMotor.attach(10); // 右电机控制引脚
}
void startRobot() {
leftMotor.write(180); // 前进
rightMotor.write(0); // 前进
}
void stopRobot() {
leftMotor.write(90); // 停止
rightMotor.write(90); // 停止
}
void avoidObstacle() {
// 后退
leftMotor.write(90); // 停止左电机
rightMotor.write(90); // 停止右电机
delay(500);
// 向后移动
leftMotor.write(0); // 向后左电机
rightMotor.write(180); // 向后右电机
delay(1000); // 后退1秒
// 停止
stopRobot();
}
void loop() {
if (!client.connected()) {
reconnect();
}
client.loop();
// 判断是否有障碍物
long distance = ultrasonic.read();
if (distance < 20) { // 距离小于20cm
avoidObstacle(); // 遇到障碍物,执行避障
}
delay(100); // 更新频率
}
代码解析
-
电机控制:使用
Servo库控制两个电机的转动。其中,leftMotor.write()和rightMotor.write()控制电机的转向和速度。 -
启动和停止机器人:
startRobot()函数设置电机为前进状态,而stopRobot()函数则停止电机。 -
避障逻辑:在
loop()中,获取超声波传感器的距离数据。如果距离小于设定的阈值(20 cm),则调用avoidObstacle()函数执行避障操作。 -
避障过程:在
avoidObstacle()中,首先停止电机,然后向后移动一段时间,最后停止电机以避免碰撞。
5. 数据处理与决策
控制模块不仅需要控制运动,还需要根据传感器数据做出智能决策。可以使用简单的状态机来处理不同的状态,例如“正常行驶”、“避障”、“待命”等。
状态机示例
以下是基于状态机的示例代码:
enum RobotState { NORMAL, AVOID, STOP };
RobotState currentState = NORMAL;
void loop() {
if (!client.connected()) {
reconnect();
}
client.loop();
long distance = ultrasonic.read();
switch (currentState) {
case NORMAL:
if (distance < 20) {
currentState = AVOID; // 进入避障状态
} else {
startRobot(); // 正常前进
}
break;
case AVOID:
avoidObstacle(); // 执行避障
if (distance >= 20) {
currentState = NORMAL; // 恢复正常状态
}
break;
case STOP:
stopRobot(); // 停止机器人
break;
}
// 处理MQTT消息
if (client.available()) {
client.loop(); // 处理MQTT消息
}
delay(100);
}
代码解析
-
状态机:定义一个
RobotState枚举类型,表示机器人的状态。机器人的状态可以是正常行驶、避障或停止。 -
状态切换:在
loop()中,通过switch语句根据当前状态执行相应操作。在正常状态下,机器人前进;在避障状态下,执行避障操作并检查距离;若安全,则恢复到正常状态。
五、项目总结
在本项目中,我们设计并实现了一款基于 ESP32 单片机 的物联网管道检修机器人。该机器人集成了先进的传感器、无线通信和人工智能技术,能够在复杂的管道环境中进行实时监测和故障检测。以下是项目的主要功能和实现过程总结:
主要功能
-
实时环境监测:
-
高清摄像头模块:实现实时视频监控,帮助操作人员远程查看管道内状况。
-
气体传感器:检测管道内有害气体(如甲烷、氨气等),确保安全。
-
温湿度传感器:监测管道环境的温度和湿度,以评估管道的状态。
-
超声波传感器:用于测距和障碍物检测,确保机器人在复杂环境中安全行驶。
-
-
无线通信:
- 采用 MQTT 协议 实现数据的高效传输,支持远程监控和控制。机器人能够将传感器数据实时发送至云平台,并接收控制指令。
-
自主导航:
- 通过 SLAM(Simultaneous Localization and Mapping) 技术,机器人能够在未知环境中进行实时定位和地图构建,实现自主导航和路径规划。
-
智能控制:
- 控制模块根据传感器数据,实时判断环境状态,执行运动控制,包括启动、停止和避障。
实现过程
-
系统架构设计:
- 设计了符合项目需求的系统架构,选用了 ESP32 单片机作为核心控制单元,并集成了各类传感器。
-
环境搭建:
- 配置了所需的硬件(如传感器、驱动模块等)和软件环境,确保系统各部分的兼容性和稳定性。
-
功能模块实现:
- 分别实现了传感器模块、通信模块、导航模块和控制模块。每个模块的代码逻辑清晰,便于理解和维护。
-
数据处理与决策:
- 使用状态机管理机器人的不同状态,实现智能决策,确保机器人在复杂环境中的安全和效率。
项目意义
本项目通过自动化和智能化的手段,提高了管道检修的效率和安全性。它不仅降低了人工成本,还能在危险环境中替代人工进行作业,减少了安全风险。此外,实时监测和数据反馈机制,为后续的管道维护和管理提供了重要的数据支持。

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐

 22
22 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)