于STM32的智能监控与巡检系统设计思路:集成OpenCV、HTTP、TCP/IP与Flask
随着工业自动化和智能化的不断发展,远程监控与巡检系统在工厂、建筑工地和灾后现场等多种场景中得到了广泛应用。本项目旨在设计一种基于智能小车的远程监控与巡检系统。该系统能够通过WiFi传输视频流,允许监控人员实时查看现场情况,同时通过手势控制小车的移动和拍摄角度,提升监测效率和安全性。在本项目中,我们成功设计并实现了一个基于智能小车的远程监控与巡检系统。该系统利用WiFi技术实现了视频流的传输和手势控
一、项目概述
项目目标
随着工业自动化和智能化的不断发展,远程监控与巡检系统在工厂、建筑工地和灾后现场等多种场景中得到了广泛应用。本项目旨在设计一种基于智能小车的远程监控与巡检系统。该系统能够通过WiFi传输视频流,允许监控人员实时查看现场情况,同时通过手势控制小车的移动和拍摄角度,提升监测效率和安全性。
主要用途
-
在工业环境中进行设备巡检与故障排查。
-
在建筑工地上进行安全监测与进度管理。
-
在灾后现场评估及救援任务中提供实时视频支持。
技术栈关键词
-
硬件:STM32微控制器、ESP8266 WiFi模块、USB摄像头、电机驱动模块
-
软件:Python、OpenCV、Flask、C语言
-
通信协议:HTTP、TCP/IP
二、系统架构
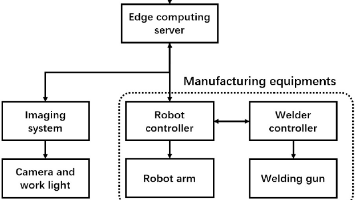
系统架构概述如下:
硬件设计
-
控制核心:选择STM32F4系列微控制器,具有强大的处理能力和丰富的外设接口,适合实时控制任务。
-
摄像头:使用USB摄像头进行实时视频采集,支持720p或1080p高清画质。
-
无线通信模块:采用ESP8266模块,支持802.11b/g/n WiFi协议,负责与PC端进行数据通信。
-
电机控制模块:使用L298N电机驱动模块,能够控制小车的前进、后退、转向等动作。
软件设计
-
PC端监控软件:基于Python开发,使用OpenCV进行图像处理和手势识别,Flask框架实现Web服务。
-
控制逻辑:在STM32上实现接收控制命令并驱动电机的逻辑,确保响应及时。
系统架构图
三、环境搭建和注意事项
硬件环境搭建
-
单片机:准备STM32F4开发板,确保板载的GPIO、UART等接口可用。
-
摄像头:确保USB摄像头能够与PC端兼容,测试在不同光照条件下的表现。
-
电机驱动:连接L298N与电机,确保电源适配,避免电流过大导致模块损坏。
软件环境搭建
-
PC端环境:
-
Python 3.x
-
安装OpenCV库:
pip install opencv-python -
安装Flask库:
pip install Flask -
STM32环境:
-
安装STM32CubeIDE或Keil进行开发和调试。
注意事项
-
电源管理:确保电源模块能够为所有组件提供稳定的电压和电流。
-
通信测试:在开发过程中,定期进行WiFi通信测试,检查信号强度和延迟问题。
-
光照条件:在进行手势识别和视频监控时,尽量在光照充足的环境下工作,以提高识别准确性。
四、代码实现过程
代码实现过程分为两个主要部分:PC端监控软件和STM32控制程序。我们将详细介绍每个模块的实现步骤、代码逻辑和时序图。
1. PC端监控软件
PC端监控软件的主要职责是视频流捕获、手势识别和控制指令的发送。我们将使用Python和OpenCV来实现这些功能。
1.1 视频流捕获与显示模块
该模块负责从USB摄像头获取实时视频流,并在窗口中显示。
代码实现:
import cv2
def start_video_stream():
cap = cv2.VideoCapture(0) # 0表示默认摄像头
if not cap.isOpened():
print("Error: Could not open video stream.")
return
while True:
ret, frame = cap.read()
if not ret:
print("Error: Could not read frame.")
break
# 显示视频流
cv2.imshow('Video Stream', frame)
# 按 'q' 键退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
start_video_stream()
流程介绍:
-
打开摄像头:使用
cv2.VideoCapture(0)打开默认摄像头。 -
循环读取帧:在
while循环中使用cap.read()读取每一帧。 -
显示帧:使用
cv2.imshow()显示当前帧。 -
退出条件:按下
q键退出视频流。
1.2 手势识别模块
该模块通过图像处理识别特定的手势,并返回相应的控制命令。我们将使用OpenCV的图像处理功能进行手势识别。
代码实现:
import cv2
import numpy as np
def detect_gesture(frame):
# 转换为灰度图
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 高斯模糊去噪
blur = cv2.GaussianBlur(gray, (15, 15), 0)
# 阈值化处理
_, thresh = cv2.threshold(blur, 100, 255, cv2.THRESH_BINARY_INV)
# 轮廓检测
contours, _ = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
if contours:
# 找到最大轮廓
max_contour = max(contours, key=cv2.contourArea)
if cv2.contourArea(max_contour) > 500: # 设定最小面积阈值
# 识别手势逻辑
# TODO: 根据轮廓的形状或面积判断手势
return "FORWARD" # 示例:返回前进命令
return "STOP"
流程介绍:
-
图像预处理:
-
将输入帧转换为灰度图像,减少计算复杂度。
-
使用高斯模糊去噪,减少噪声对轮廓检测的影响。
-
阈值化:对模糊图像进行阈值化处理,将手势与背景分离。
-
轮廓检测:使用
cv2.findContours方法查找图像中的轮廓。 -
手势判断:根据最大轮廓面积判断是否为有效手势,并返回相应的控制命令。
1.3 控制命令发送模块
该模块将识别到的手势转换为控制指令,并通过HTTP POST请求发送给STM32控制模块。
代码实现:
import requests
def send_command_to_car(command):
url = "http://<STM32_IP_ADDRESS>/control" # 替换为STM32的实际IP地址
try:
response = requests.post(url, json={'command': command})
if response.status_code == 200:
print(f"Command '{command}' sent successfully!")
else:
print("Error sending command:", response.status_code)
except Exception as e:
print("Exception occurred:", e)
if __name__ == "__main__":
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("Error: Could not open video stream.")
exit()
while True:
ret, frame = cap.read()
if not ret:
print("Error: Could not read frame.")
break
gesture = detect_gesture(frame) # 检测手势
send_command_to_car(gesture) # 发送控制命令
cv2.imshow('Video Stream', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
流程介绍:
-
在主程序中,启动摄像头并进入主循环。
-
每次读取一帧视频流后,调用
detect_gesture(frame)函数识别手势。 -
根据识别结果调用
send_command_to_car(gesture)函数将命令发送给STM32。 -
如果按下
q键,则退出循环和释放资源。
2. STM32控制程序
STM32控制程序的职责是接收来自PC端的控制命令,解析命令并驱动电机控制小车的运动。
2.1 初始化设置
在STM32中,我们需要初始化GPIO、WiFi模块以及串口通信。
代码实现:
#include "stm32f4xx_hal.h"
#include "string.h"
UART_HandleTypeDef huart2; // 通过USART2进行WiFi通信
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
// 电机控制函数
void move_forward() {
// 控制电机前进的逻辑
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_SET); // 假设PA1控制电机前进
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_RESET); // 假设PA2控制电机反向
}
void move_backward() {
// 控制电机后退的逻辑
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_SET);
}
void stop_movement() {
// 停止电机
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_1, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_2, GPIO_PIN_RESET);
}
// 控制命令解析函数
void parse_command(char* command) {
if (strcmp(command, "FORWARD") == 0) {
move_forward();
} else if (strcmp(command, "BACKWARD") == 0) {
move_backward();
} else {
stop_movement();
}
}
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
char command[20];
// 主循环
while (1) {
// 读取命令
if (HAL_UART_Receive(&huart2, (uint8_t*)command, sizeof(command), HAL_MAX_DELAY) == HAL_OK) {
command[strcspn(command, "\r\n")] = 0; // 去除换行符
parse_command(command); // 解析并执行命令
}
}
}
// USART2初始化
static void MX_USART2_UART_Init(void) {
huart2.Instance = USART2;
huart2.Init.BaudRate = 115200; // 设置波特率
huart2.Init.WordLength = UART_WORDLENGTH_8B; // 数据位长度
huart2.Init.StopBits = UART_STOPBITS_1; // 停止位
huart2.Init.Parity = UART_PARITY_NONE; // 无奇偶校验
huart2.Init.Mode = UART_MODE_TX_RX; // 收发模式
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE; // 无硬件流控
huart2.Init.OverSampling = UART_OVERSAMPLING_16; // 过采样设置
if (HAL_UART_Init(&huart2) != HAL_OK) {
Error_Handler(); // 初始化失败时的处理
}
}
// GPIO初始化
static void MX_GPIO_Init(void) {
__HAL_RCC_GPIOA_CLK_ENABLE(); // 使能GPIOA时钟
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置电机控制引脚
GPIO_InitStruct.Pin = GPIO_PIN_1 | GPIO_PIN_2; // 假设PA1和PA2用于电机控制
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 低速
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化GPIO
}
流程介绍:
-
USART初始化:配置USART的波特率、数据位、停止位和工作模式,以确保能够接收和发送数据。
-
GPIO初始化:配置用于电机控制的GPIO引脚为推挽输出模式。
2.2 主循环与命令处理
在主循环中,STM32将持续监测是否有新的命令到来,并根据收到的命令执行相应的动作。
完整代码实现:
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART2_UART_Init();
char command[20]; // 用于存储接收到的命令
// 主循环
while (1) {
// 读取命令
if (HAL_UART_Receive(&huart2, (uint8_t*)command, sizeof(command), HAL_MAX_DELAY) == HAL_OK) {
command[strcspn(command, "\r\n")] = 0; // 去除换行符
parse_command(command); // 解析并执行命令
}
}
}
// 错误处理函数
void Error_Handler(void) {
// 用户可以添加自己的错误处理代码
while (1) {
// 在此处可以添加LED闪烁或其他错误指示
}
}
流程介绍:
-
主循环:在
while (1)循环中,STM32使用HAL_UART_Receive函数接收命令。 -
命令解析:接收到命令后,去除换行符并调用
parse_command函数解析命令,执行相应的电机控制函数。 -
错误处理:如果USART初始化失败,则调用
Error_Handler()进行错误处理。
3. 系统运行流程
系统的整体运行流程如下:
-
PC端监控软件启动:用户启动PC端监控软件,打开摄像头并开始捕获视频流。
-
实时手势识别:通过
detect_gesture函数识别用户的手势,并根据手势类型生成对应的控制命令(例如:“FORWARD”、“BACKWARD”、“STOP”)。 -
发送控制命令:将识别到的命令通过HTTP POST请求发送至STM32控制模块。
-
STM32接收命令:STM32在主循环中持续监听USART,接收到控制命令后解析并执行相应的电机控制操作。
-
小车运动控制:根据接收到的命令,小车执行前进、后退或停止的操作。STM32控制模块通过GPIO信号控制电机驱动模块,从而实现小车的移动。
-
实时视频监控:PC端监控软件持续接收视频流,监控人员可以在PC屏幕上实时查看小车所在环境的状态,确保监控效果。
-
反馈与调整:监控人员可以根据实时视频流调整手势或直接发送新的控制命令,以优化小车的移动路径或重新进行巡检。
4. 时序图
以下是系统交互的时序图,展示了PC端监控软件与STM32控制模块之间的交互流程。
5. 项目总结
在本项目中,我们成功设计并实现了一个基于智能小车的远程监控与巡检系统。该系统利用WiFi技术实现了视频流的传输和手势控制,具有以下几个主要功能:
-
实时视频监控:通过USB摄像头采集的视频流,监控人员可以实时查看现场情况。
-
手势控制:使用OpenCV进行手势识别,监控人员通过简单的手势即可控制小车的移动和方向。
-
数据传输:通过WiFi模块,实现了PC与STM32之间的高效数据传输。

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐

 16
16 0
0- 0



 已为社区贡献10条内容
已为社区贡献10条内容

所有评论(0)