
Python 实现的运筹优化系统数学建模详解(多目标规划模型)
文章聚焦数学建模中的多目标规划模型,开篇点明其在复杂实际场景中平衡多个冲突目标的重要地位。随后详细阐述模型原理,包括一般形式与常见约束条件。在算法实现部分,介绍了转化为标准优化问题的方法、适用的优化算法以及以 SQP 算法为例的迭代求解过程。代码解析涵盖导入库、关键函数定义、主程序逻辑及使用方法。最后,列举生产调度、资源分配等多领域应用场景。文章旨在全方位呈现多目标规划模型,助力读者理解、掌握并应
一、引言
在数学建模的广阔领域中,多目标规划模型占据着极为重要的地位。它致力于在复杂的实际场景里,同时优化多个相互冲突的目标,寻求一组决策变量,让多个目标函数在满足特定约束条件下达到某种平衡。这种模型广泛应用于生产调度、资源分配、投资决策等众多领域,为解决现实中的复杂问题提供了强大的工具。本文将深入探究多目标规划模型的核心原理、详细的算法实现过程,深入解读其 Python 代码,并全面探讨它在各类实际场景中的应用。
二、多目标规划模型原理
2.1 模型描述
多目标规划模型的一般形式为:在给定的约束条件下,对多个目标函数 \(f_1(x), f_2(x), \cdots, f_n(x)\) 进行优化。与单目标规划不同,多目标规划通常不存在一个绝对最优解能使所有目标函数同时达到最优,而是存在一组 Pareto 最优解。这些解的特性是,在不使其他目标变差的情况下,无法进一步改进任何一个目标。
从数学表达式来看,多目标规划问题可表示为: \(\begin{align*} \min_{x} &\quad (f_1(x), f_2(x), \cdots, f_n(x)) \\ \text{s.t.} &\quad g_j(x) \leq 0, \quad j = 1,2,\cdots,p \\ &\quad h_k(x) = 0, \quad k = 1,2,\cdots,q \end{align*}\) 其中,x 为决策变量向量,\(f_i(x)\) 是关于 x 的目标函数,\(g_j(x)\) 和 \(h_k(x)\) 分别是不等式约束函数和等式约束函数。
2.2 约束条件
在实际问题中,决策变量 x 必然受到各种约束条件的限制。常见的约束条件包括:
- 边界约束: \(lb_j \leq x_j \leq ub_j, \quad j = 1,2,\cdots,m\) 这里,\(lb_j\) 和 \(ub_j\) 分别是决策变量 \(x_j\) 的下限和上限,限制了变量的取值范围。
- 线性不等式约束: \(\sum_{j=1}^{m} a_{ij}x_j \leq b_i, \quad i = 1,2,\cdots,p\) 其中 \(a_{ij}\) 和 \(b_i\) 为给定的系数和常数,描述了变量之间的线性关系限制。
- 线性等式约束: \(\sum_{j=1}^{m} c_{kj}x_j = d_k, \quad k = 1,2,\cdots,q\) \(c_{kj}\) 和 \(d_k\) 是相应的系数和常数,规定了变量必须满足的等式关系。
三、多目标规划模型的算法实现讲解
3.1 转化为标准优化问题
多目标规划问题的求解通常需要将其转化为更容易处理的形式。一种常见的方法是加权法,通过为每个目标函数赋予一个权重,将多个目标函数组合成一个综合目标函数。假设 \(w_1, w_2, \cdots, w_n\) 是各目标函数的权重,且 \(\sum_{i=1}^{n} w_i = 1\),则综合目标函数可以表示为: \(F(x) = \sum_{i=1}^{n} w_i f_i(x)\) 此时,原多目标规划问题就转化为单目标优化问题: \(\begin{align*} \min_{x} &\quad F(x) \\ \text{s.t.} &\quad g_j(x) \leq 0, \quad j = 1,2,\cdots,p \\ &\quad h_k(x) = 0, \quad k = 1,2,\cdots,q \end{align*}\) 另一种方法是使用目标规划法,引入偏差变量,将目标函数转化为约束条件,再通过最小化偏差变量来求解。
3.2 选择优化算法
对于转化后的标准优化问题,可以运用多种优化算法进行求解,常见的算法如下:
- 线性规划算法:当目标函数和约束条件均为线性时,可使用单纯形法、内点法等线性规划算法。例如,在一些简单的资源分配问题中,目标函数和约束条件可以用线性方程表示,此时线性规划算法能够高效地找到最优解。
- 非线性规划算法:若目标函数或约束条件存在非线性部分,则需采用非线性规划算法。如序列二次规划(Sequential Quadratic Programming, SQP),它通过迭代求解一系列二次规划子问题来逼近最优解;还有遗传算法,它模拟生物进化过程,通过选择、交叉和变异等操作在解空间中搜索最优解,适用于复杂的非线性问题,尤其是解空间较大且难以用传统方法求解的情况。
- 智能优化算法:包括粒子群优化算法(Particle Swarm Optimization, PSO)、蚁群算法等。粒子群优化算法模拟鸟群觅食行为,通过粒子间的信息共享和相互协作来寻找最优解;蚁群算法则模拟蚂蚁觅食过程中分泌信息素的行为,通过信息素的积累和更新来引导搜索方向,这些算法在处理多峰、多约束等复杂问题时表现出良好的性能。
3.3 迭代求解过程
以序列二次规划算法(SQP)为例,其迭代求解过程大致如下:
- 初始化:给定决策变量 x 的初始值 \(x^0\),设置迭代次数 \(k = 0\),并设定收敛精度 \(\epsilon\)。
- 计算梯度信息:在当前迭代点 \(x^k\) 处,计算目标函数 \(F(x)\) 和约束函数 \(g_j(x)\)、\(h_k(x)\) 的梯度。
- 构建二次规划子问题:根据梯度信息,构建一个二次规划子问题,其目标函数是目标函数 \(F(x)\) 在 \(x^k\) 处的二阶泰勒展开近似,约束条件则基于原问题的约束条件在 \(x^k\) 处的线性化。
- 求解二次规划子问题:使用合适的二次规划算法求解构建的子问题,得到搜索方向 \(d^k\)。
- 确定步长:采用线搜索方法确定合适的步长 \(\alpha_k\),使得在沿着搜索方向 \(d^k\) 移动步长 \(\alpha_k\) 后,目标函数值得到足够的下降。
- 更新决策变量:根据步长和搜索方向更新决策变量,即 \(x^{k + 1} = x^k + \alpha_k d^k\)。
- 判断收敛条件:检查是否满足收敛条件,如 \(\| x^{k + 1} - x^k \| < \epsilon\) 或者目标函数值的变化小于某个阈值。若满足收敛条件,则停止迭代,输出最优解;否则,令 \(k = k + 1\),返回步骤 2 继续迭代。
四、代码详细解析(根据一个具体的例子展开)
4.1 导入必要的库
python
import numpy as np
from scipy.optimize import linprog
import matplotlib.pyplot as plt
numpy库:Python 中用于科学计算的核心库,提供了高效的多维数组对象和丰富的数学函数。在代码中,我们利用它来处理数值计算,如创建和操作数组、进行线性代数运算等。scipy.optimize.linprog:scipy库中用于求解线性规划问题的函数,我们将借助它来求解多目标规划模型转化后的线性规划问题。matplotlib.pyplot:用于数据可视化的库,可帮助我们绘制各种图表,直观展示多目标规划模型的结果,如权重与目标函数值的关系图等。
4.2 定义求解线性规划的函数
python
def solve_linear_programming(w1, w2, A, b, bounds,f0):
"""
求解线性规划问题
参数:
w1 (float): 目标函数中第一个变量的权重
w2 (float): 目标函数中第二个变量的权重
A (numpy.ndarray): 不等式约束的系数矩阵
b (numpy.ndarray): 不等式约束的右侧向量
bounds (tuple): 变量的边界
返回:
x (numpy.ndarray): 最优解
fval (float): 最优目标函数值
f1 (float): 第一个目标函数值
f2 (float): 第二个目标函数值
"""
c = [w1 / f0[0] * 2 + w2 / f0[1] * 0.4, w1 / 30 * 5 + w2 / 2 * 0.3]
result = linprog(c, A_ub=A, b_ub=b, bounds=bounds, method='highs')
x = result.x
fval = result.fun
f1 = 2 * x[0] + 5 * x[1]
f2 = 0.4 * x[0] + 0.3 * x[1]
return x, fval, f1, f2
- 参数说明:
w1和w2:分别为两个目标函数的权重,用于构建综合目标函数。A和b:定义不等式约束条件,A是系数矩阵,b是右侧向量。bounds:指定决策变量的取值范围。f0:包含两个目标函数的参考值,用于归一化目标函数系数。
- 函数内部逻辑:
- 首先根据权重和参考值计算综合目标函数的系数
c。 - 然后使用
linprog函数求解线性规划问题,得到最优解x和最优目标函数值fval。 - 最后根据最优解计算两个原始目标函数值
f1和f2,并将结果返回。
- 首先根据权重和参考值计算综合目标函数的系数
4.3 定义绘图函数
python
def plot_weight_vs_objective(weights, objectives, label, title):
"""
绘制权重与目标函数值的关系图
参数:
weights (numpy.ndarray): 权重数组
objectives (list): 目标函数值列表
label (str): 图例标签
title (str): 图标题
"""
plt.plot(weights, objectives, label=label)
plt.xlabel('f1的权重w1')
plt.ylabel('目标函数值')
plt.legend()
plt.title(title)
plt.grid()
- 参数说明:
weights:包含不同权重值的数组,用于表示横坐标。objectives:对应不同权重下的目标函数值列表,作为纵坐标数据。label:用于在图例中标识曲线的名称。title:设置图表的标题。
- 函数功能:使用
matplotlib库绘制权重与目标函数值的关系曲线,通过设置坐标轴标签、添加图例、标题和网格,使图表更加清晰直观,方便观察权重变化对目标函数值的影响。
4.4 主程序部分
python
# 定义权重范围
weight_range = np.arange(0.1, 0.501, 0.001)
# 定义约束条件
A = np.array([[-1, -1]])
b = np.array([-7])
lb = [0, 0]
ub = [5, 6]
bounds = [(lb[0], ub[0]), (lb[1], ub[1])]
#f1与f2的参考值
f0=[30,2]
# 初始化列表
X1, X2, Fval, F1, F2 = [], [], [], [], []
# 遍历不同权重组合,求解线性规划
for w1 in weight_range:
w2 = 1 - w1
x, fval, f1, f2 = solve_linear_programming(w1, w2, A, b, bounds,f0)
X1.append(x[0])
X2.append(x[1])
Fval.append(fval)
F1.append(f1)
F2.append(f2)
# 绘图
# 图片1, 权重与目标函数值的关系
plt.figure()
plot_weight_vs_objective(weight_range, F1, 'f1', '权重与目标函数值的关系')
plot_weight_vs_objective(weight_range, F2, 'f2', '')
# plt.show()
# 图片2, 权重值与目标函数值的关系
plt.figure()
plot_weight_vs_objective(weight_range, X1, 'x1', '权重与目标函数值的关系')
plot_weight_vs_objective(weight_range, X2, 'x2', '')
# plt.show()
# 图片3, 综合指标与权重的关系
plt.figure()
plot_weight_vs_objective(weight_range, Fval, 'Fval', '权重与目标函数值的关系')
plt.show()
- 权重范围与约束条件设置:
- 使用
np.arange定义权重w1的变化范围从0.1到0.501,步长为0.001。 - 定义不等式约束条件,如矩阵
A和向量b表示-x1 - x2 <= -7,即x1 + x2 >= 7;同时设置决策变量x1和x2的边界bounds。 - 给出两个目标函数的参考值
f0。
- 使用
- 迭代求解与结果存储:
- 通过循环遍历不同的
w1值,计算对应的w2(因为w1 + w2 = 1)。 - 调用
solve_linear_programming函数求解线性规划问题,得到最优解x、综合目标函数值fval以及两个原始目标函数值f1和f2。 - 将每次迭代得到的
x1、x2、Fval、F1和F2分别存储到对应的列表中。
- 通过循环遍历不同的
- 结果可视化:
- 使用
plot_weight_vs_objective函数绘制三张图表:- 第一张图展示权重
w1与两个原始目标函数值F1和F2的关系。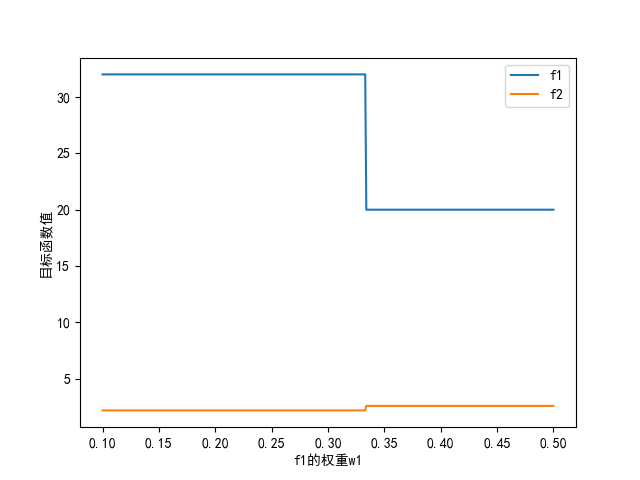
- 第二张图展示权重
w1与最优解中两个变量x1和x2的关系。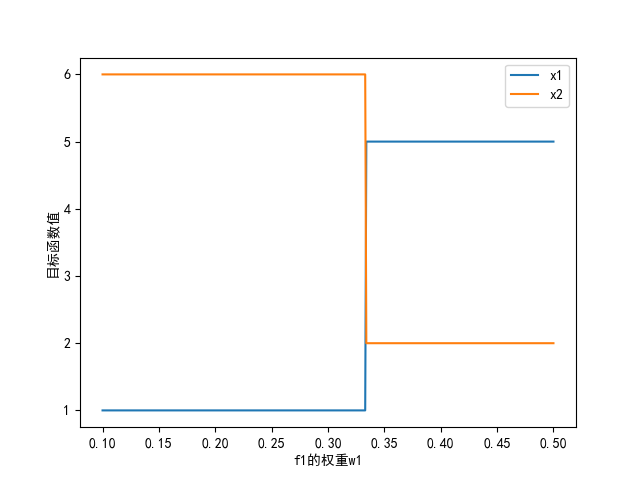
- 第三张图展示权重
w1与综合目标函数值Fval的关系。通过这些图表,可以直观地分析权重变化对多目标规划结果的影响。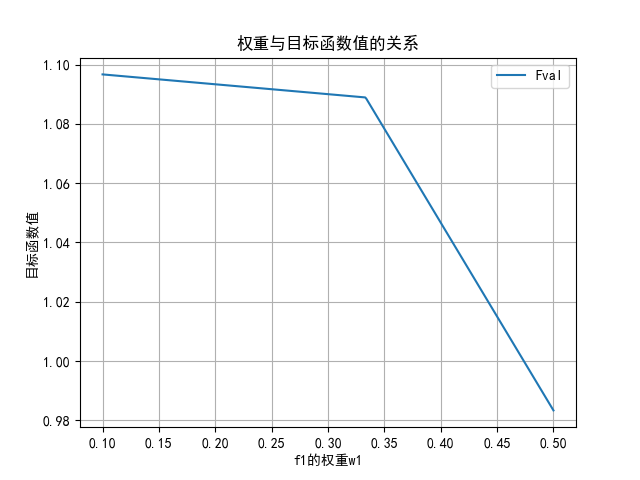
- 第一张图展示权重
- 使用
4.5 代码使用方法
- 运行代码前,需确保已安装
numpy、scipy和matplotlib库。 - 代码运行后,无需手动输入数据,因为代码中已预先设定好权重范围、约束条件等参数。若要修改这些参数,可直接在代码中对应部分进行调整。例如,若要改变权重范围,可修改
weight_range = np.arange(0.1, 0.501, 0.001)中的起始值、终止值和步长;若要修改约束条件,可调整A、b、lb、ub等变量的值。 - 代码运行结束后,会自动弹出三个图表窗口,分别展示不同的关系图,帮助用户直观了解多目标规划模型在不同权重下的结果变化。
五、多目标规划模型在数学建模中的应用场景
5.1 生产调度问题
在制造业中,企业常常面临生产调度的难题。例如,同时生产多种产品时,需要考虑最大化生产利润、最小化生产成本以及最小化生产时间等多个目标。不同产品的生产工艺、原材料消耗和市场价格各不相同,通过构建多目标规划模型,可以在满足生产设备能力、原材料供应等约束条件下,确定每种产品的最优生产数量和生产顺序。比如,对于生产两种产品的工厂,一种产品利润高但生产时间长,另一种产品利润低但生产时间短,利用多目标规划模型,根据市场需求和企业对利润、生产时间的侧重,找到最佳的生产组合,以实现企业效益的最大化平衡。
5.2 资源分配问题
资源分配是众多领域都会遇到的问题。以水资源分配为例,在一个区域内,农业灌溉、工业用水和居民生活用水都对水资源有需求。一方面要保证农业生产以维持粮食产量,这可能需要大量稳定的水资源供应;另一方面,工业用水对于区域经济发展至关重要,不同工业企业的用水需求和效益产出也不同;同时,居民生活用水是保障民生的基本需求。通过多目标规划模型,可以综合考虑各方面的用水需求、水资源总量限制以及不同用水用途的效益权重,制定出合理的水资源分配方案,实现水资源的高效利用和社会经济的可持续发展。类似的,在电力分配、人力资源分配等问题中,多目标规划模型也能发挥重要作用,平衡不同需求方的利益。
5.3 投资决策问题
在金融投资领域,投资者在选择投资项目时,通常希望同时实现多个目标。一方面,追求最大化投资回报率以获取更多收益;另一方面,要最小化投资风险,
确保资金的安全性;此外,部分投资者还会考虑投资项目的社会效益等其他目标。不同的投资项目具有不同的预期回报率、风险水平以及社会效益贡献。例如,投资新兴科技企业可能带来高回报率,但同时伴随着高风险;而投资传统基础设施项目,风险相对较低,但回报率也可能较为有限。通过构建多目标规划模型,投资者可以根据自身的风险偏好、收益预期以及对社会效益的重视程度,为各个目标函数赋予相应权重,在众多投资项目中筛选出最优的投资组合,实现投资目标的综合平衡。
5.4 交通规划问题
在城市交通规划中,多目标规划模型有着广泛的应用。例如,在规划新的公交线路或建设城市道路时,需要同时考虑多个目标。一是要最小化交通拥堵,通过合理规划路线和设置交通设施,提高道路的通行能力,减少车辆的行驶时间和等待时间;二是要最小化建设成本,包括土地购置费用、工程建设费用等,在满足交通需求的前提下,控制公共资源的投入;三是要最大化交通安全性,通过科学的道路设计、交通信号设置等措施,降低交通事故的发生率。利用多目标规划模型,可以在这些相互冲突的目标之间找到平衡点,制定出既经济又高效且安全的交通规划方案,提升城市的交通运行效率和居民的出行体验。
5.5 环境管理问题
在环境管理方面,多目标规划模型同样具有重要价值。以区域污染控制为例,需要同时考虑多个目标。一方面,要最大程度地降低污染物的排放总量,以改善区域的环境质量,保护生态系统的健康;另一方面,企业为了实现减排目标往往需要投入额外的资金用于污染治理设施的建设和运行,这会增加企业的生产成本,影响企业的经济效益,因此需要在一定程度上平衡企业的经济负担。此外,还可能需要考虑就业影响等其他因素,因为过于严格的减排措施可能导致一些企业减产甚至倒闭,进而影响当地的就业情况。通过构建多目标规划模型,结合区域的环境容量、经济发展状况以及社会稳定需求等约束条件,可以制定出合理的污染控制策略,实现环境保护与经济社会发展的协调共进。
六、总结
总之,多目标规划模型在数学建模中是一种功能强大且应用广泛的工具。通过深入理解其原理,熟练掌握算法实现,并结合具体的实际场景进行灵活运用,能够为众多复杂问题提供科学、有效的解决方案,助力各领域在多方面目标之间达成理想的平衡。

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐


 34
34 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)