Rokid 手势识别技术深度解析:解锁 AR 无接触交互的核心秘密
在聊手势识别前,咱们先搞清楚:Rokid是谁?它为啥能把AR手势做得这么自然?Rokid是国内AR(增强现实)领域的“老兵”了,从2014年成立就盯着一个目标——让AR走进日常。你可能见过它的产品:能戴在脸上的“AR眼镜”Max Pro、能揣在兜里的“AR主机”Station 2、适合专业场景的“Station Pro”,这些设备不是用来“炫技”的,而是想让咱们摆脱手机、手柄的束缚,直接用手“摸”
引言
在聊手势识别前,咱们先搞清楚:Rokid是谁?它为啥能把AR手势做得这么自然?
Rokid是国内AR(增强现实)领域的“老兵”了,从2014年成立就盯着一个目标——让AR走进日常。你可能见过它的产品:能戴在脸上的“AR眼镜”Max Pro、能揣在兜里的“AR主机”Station 2、适合专业场景的“Station Pro”,这些设备不是用来“炫技”的,而是想让咱们摆脱手机、手柄的束缚,直接用手“摸”虚拟东西。

而手势识别,就是Rokid给AR设备装的“最自然的遥控器”——比如调大虚拟屏幕像捏橡皮一样捏合手指,翻页像翻书一样挥手。但不同设备、不同开发需求,需要搭配不同版本的SDK(软件开发工具包),这就像“不同型号的手机要装对应版本的APP”。

一、基础认知:先选对版本,避免开发走弯路
Rokid手势识别技术随SDK版本迭代持续优化,不同版本适配的Unity(开发工具)、设备、功能都不一样。咱们先看一张“版本适配表”,选对版本再动手:
| UXR SDK 版本 | 支持 Unity 版本 | 核心功能差异 | 适配设备 | 适合人群 |
|---|---|---|---|---|
| UXR 2.0 | 2020/2021/2022 LTS | 基础4类手势(捏合/握拳/手掌/松开)、基础远近场切换 | Station 2、Max Pro、AR Lite | 新手入门、常规手势交互开发 |
| UXR 3.0 | 2022/2023.3 LTS | 新增图像识别(如扫二维码)、手势置信度过滤、模型轻量化30% | Station Pro、Max 2、AR Studio | 高级交互、性能优化需求开发者 |
举个例子:如果你的电脑装的是Unity 2023,就选UXR 3.0;如果用的是2021且只需要简单手势,UXR 2.0更稳定(参考Rokid版本文档)。
二、技术拆解:Rokid手势识别的“三阶段秘密”
不管是UXR 2.0还是3.0,手势识别的核心逻辑都是“看得到手→认得出手势→跟得上手”,但3.0在每个阶段都做了优化。咱们一步步拆,全程不用复杂术语。
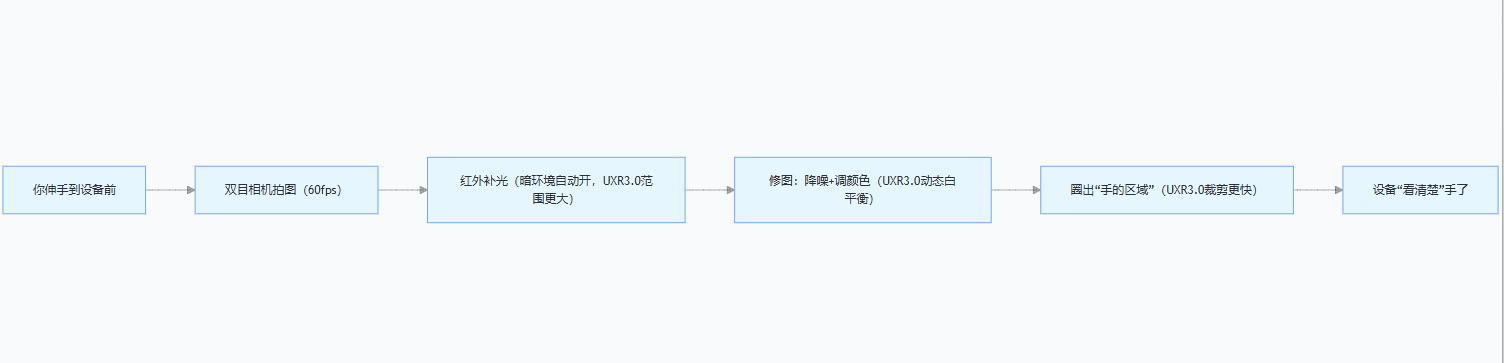
2.1 看得到手——Rokid的“AR专属眼睛”
要让设备“看见”手,那肯定要在算法和摄像头这方面下足功夫。Rokid 的 3D 手势算法在这个领域取得了关键性突破。在手势识别方面,只依赖一颗普通的 RGB 摄像头,无需复杂的多摄像头或 ToF(飞行时间)传感器。大大降低了硬件成本,同时保持了高精度和稳定性。
- 利用 AI 算法和深度学习模型,Rokid的“AR专属眼睛” 能实时捕捉手部的 3D 姿态信息,包括手部的 6DoF(六自由度)位置、26 个关节点的自由度(26DoF)以及 Hand Mesh(手部网格)信息。
- 在响应速度上,该算法在移动端实现了毫秒级的响应速度,单帧检测耗时低于 10 毫秒,识别准确率达到 99%,且深度估计误差小于 5 厘米。
- 并且该算法可以运行在多种硬件架构上,包括 CPU、GPU 和 NPU,适配高通、海思等主流平台

2.2 认得出手势——给手“画骨架”再判断
设备看清楚手后,下一步是“认出你在做什么手势”,核心是“标骨骼点→看姿势”,UXR 3.0在分类精度上做了优化。
- 26个骨骼点:给手“标关键位置”
你把手张开,Rokid会在手上“标26个点点”,像医生画关节标记,每个点都有用:
- 腕部(WRIST):确定手的“根在哪”,避免手移动判错位置;
- 掌心(PALM):判断手“面朝设备还是背对设备”——掌心朝设备就是想“直接摸”;
- 指尖(食指尖、拇指尖):判断“捏合”“点击”的关键,UXR 3.0的骨骼点定位精度提升了10%,指尖位置更准。
设备怎么找这些点?用“热力图回归”——给手画“热力图”,哪个位置亮,哪个就是骨骼点,比如食指尖是“亮斑”,直接找亮斑就行。
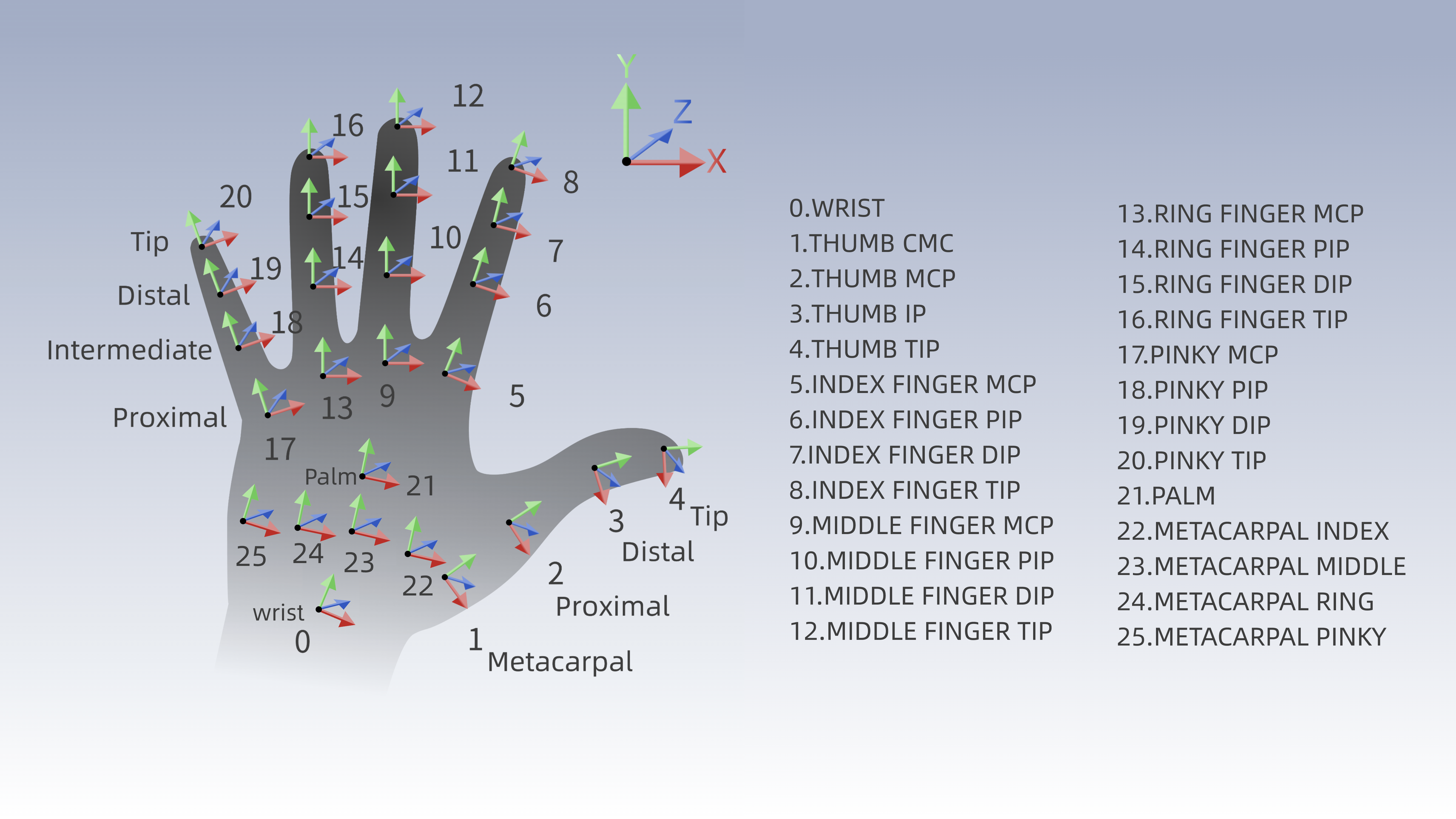
26个节点,分别是手腕WRIST,掌心PALM,4个掌骨(METACARPAL)节点,和5根手指关节节点,拇指从CMC指骨末节依次MCP、IP、TIP指尖,其他从MCP指骨末节依次PIP、DIP、TIP指尖。
- 手势分类:看“骨架姿势”下判断

有了骨骼点,设备就像“看姿势猜动作”,通过“点和点的关系”判断手势。咱们用表格总结常见手势,还标了版本优化:
| 手势类型 | 核心判断条件(大白话) | 对应现实动作 | 版本优化(UXR3.0) |
|---|---|---|---|
| 捏合(Pinch) | 拇指尖+食指尖距离<2cm,其他手指弯 | 捏小物件(如豆子) | 新增“置信度过滤”,<80%不响应,误判少30% |
| 握拳(Grip) | 所有指尖都靠近掌心 | 攥拳头 | 支持“半握拳”识别,不用完全攥紧 |
| 手掌(Palm) | 所有手指伸直,指尖离掌心远 | 张开手要东西 | 手掌倾斜30°也能识别,更灵活 |
| 捏合松开(OpenPinch) | 之前是捏合,现在拇指+食指距离>4cm | 松开东西 | 响应速度快了10ms,更跟手 |
比如你戴戒指捏合,UXR 3.0能忽略戒指干扰,只要指尖距离够近就认“捏合”,不用“为了凑手势摘戒指”。
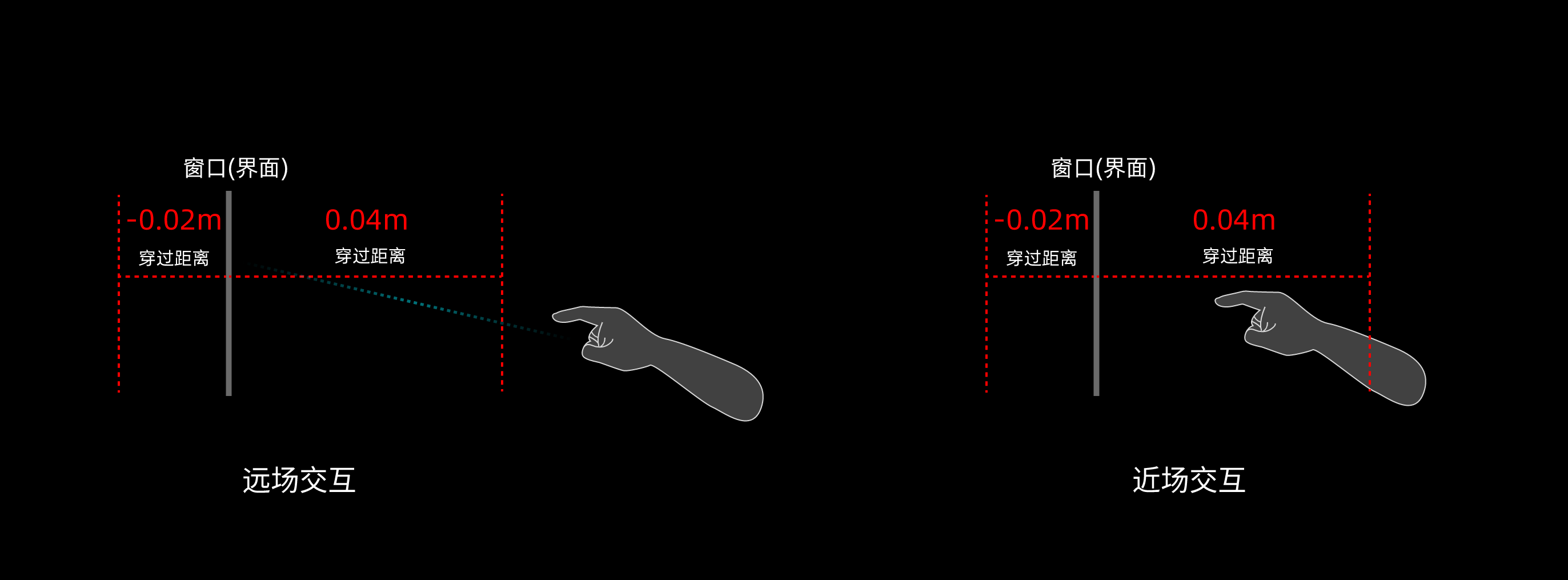
2.3 近/远场手势:实现 “距离一变,模式就换”
Rokid将手势分为近场手势和远场手势:直接进行触碰互动的,称为近场手势;通过射线和锚点远距离操控的,是远场手势。近场手势和远场手势的切换,是通过手与互动物体的距离判定,这个值可以根据具体使用场景调节。默认设置是,手在距离互动物体 -0.02m ~ 0.04 m 范围内,是近场手势;超出则为远场。
在 UI 操作上Rokid 通过 “近→触→压→抬” 四阶段交互反馈实现:默认时 UI 保持静止;手靠近进入 hover 状态,按钮向上抬动 “预告交互”;手指触摸时,按钮微变色、微缩放;按压到底,按钮高亮放大且触发 “Down” 音效;手抬起,按钮复原,“Up” 音效响起,完成点击。

2.4 跟得上手——快反应+低门槛
技术再厉害,手一动、虚拟东西半天才动就很糟;开发者要写几百行代码也没人用。Rokid在“跟手”和“开发门槛”上做了很多优化,3.0更突出。
- 快反应:手势和虚拟动作“同步”
你手一动,虚拟东西马上动,背后是两个关键优化:
- 轻量化模型:把识别算法“压缩”——UXR 3.0的模型比2.0小30%,像大文件压成小文件,不占内存还跑得快,识别延迟从120ms降到100ms(人眼几乎感觉不到);
- 动态帧率调节:设备“看情况干活”——手不动时识别频率降为20fps(省电量),手快速动时升为30fps(不延迟),UXR 3.0的帧率切换更平滑,不会卡顿。

- 低门槛:开发者不用“从零造轮子”
Rokid把复杂技术封装成“现成工具”,不同版本的SDK导入和使用略有差异,咱们分版本说:
| 操作步骤 | UXR 2.0 实现方式 | UXR 3.0 实现方式(优化后) |
|---|---|---|
| 1. 导入SDK | 从官网下载压缩包,手动拖进Unity | 通过Unity Package Manager(UPM)导入,输仓库地址:https://docs.unity.cn/cn/current/Manual/Packages.html |
| 2. 开启手势模块 | 拖“RKInput”预制体,勾选“Gesture” | 同上,但新增“一键启用”按钮,不用找模块 |
| 3. 获取手势数据 | 调用GesEventInput.Instance.GetGestureType(HandType.RightHand) | 同上,还能获取“手势置信度”(如GetGestureConfidence()) |
举个最简单的例子:开发者要实现“手势点击按钮变色”,不管2.0还是3.0,都只要3步,3.0还更简单:
- 拖“PointableUI”预制体到场景(2.0/3.0都有);
- 在预制体里加个按钮;
- 写几行代码(如下),3.0还能加“置信度判断”:
using UnityEngine;
using UnityEngine.EventSystems;
using UnityEngine.UI;
using Rokid.UXR.Module; // 需导入命名空间
public class GestureBtn : MonoBehaviour, IPointerClickHandler
{
private Image btnImg;
void Start() {
btnImg = GetComponent<Image>();
}
// 手势点击时触发
public void OnPointerClick(PointerEventData eventData) {
// UXR 3.0新增:判断手势置信度,避免误点击
float confidence = GesEventInput.Instance.GetGestureConfidence(HandType.RightHand);
if (confidence > 0.8f) {
btnImg.color = Color.green; // 置信度>80%才变色
}
}
}
三、实战:UXR 3.0 做“手势抓立方体”
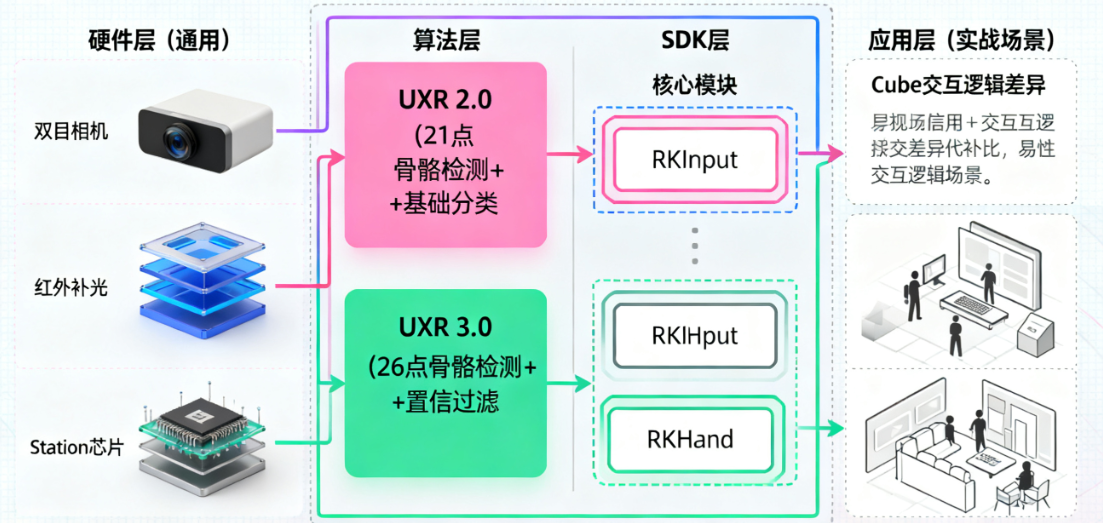
3.1 全流程架构图(理解数据流向)
手势抓立方体的核心是「硬件采集→算法处理→SDK 分发→应用响应」,分版本数据流向差异如下(基于 Rokid AR Platform 架构简化):
3.2 前置准备:UXR 3.0 环境确认
硬件环境
为了顺利接入UXR3.0 SDK,硬件环境要求如下:
- 可进行Unity开发的PC设备:支持用于Unity开发的Mac或Windows PC设备。
- 空间计算设备:配备Rokid Station Pro/Rokid Station2设备。
- 眼镜设备:配备Rokid Max Pro/Rokid Max/Rokid Max2眼镜。
软件环境
作为专为Unity开发者打造的高级开发工具包,Rokid Unity OpenXR Plugin要求开发者具备完整的Unity开发环境以及对应的Android Build Support(包括Android SDK、NDK工具链和OpenJDK)。具体版本要求如下:
- Unity开发环境:使用Unity 2022 LTS版本。
- Android Build Support环境:
- Android SDK
- NDK Tools
- OpenJDK
- 移动平台支持:Android Platform号码应为28至34。
- 操作系统要求:YodaOS系统版本不低于v3.30.003-20250120-800201。
详细安装步骤这里可以参考官方文档 【一键直达】来一步步进行就好啦
3.3 步骤1:场景搭建与 UXR 3.0 专属配置
3.3.1 添加核心组件
- 拖入交互预制体:
- 将
RKHand预制体拖入场景,展开RKHand→RightHandInteractors,保留默认的PokeInteractor(近场抓取)和RayInteractor(远场射线),开启**InteractorStateChange**脚本(默认启用,支持自动远近场切换,也可后续自定义); - 选中
RightHandInteractors下的InteractorStateChange,在 Inspector 面板设置:- “Near Field Threshold”:0.8m(近场触发距离,可按需调整);
- “Gesture Confidence Filter”:0.8(过滤置信度<80%的手势,减少误判,UXR 3.0 新增)。
- 将
- 创建可抓取 Cube:
- 右键创建 3D Object → Cube,命名“GrabCube”,配置参数:
Transform:Position(0, 1.2, 0.8)(相机前方 0.8m,刚好触发近场)、Scale(0.2, 0.2, 0.2);- 挂载组件:
Box Collider(取消“Is Trigger”,确保交互碰撞)、RayInteractable(Rokid 专属交互组件,允许手势识别)。
- 右键创建 3D Object → Cube,命名“GrabCube”,配置参数:
- 开启骨骼可视化(调试必备):选中
RKHand→RightHandRender,勾选SkeletonLine组件,设置“Line Color”为红色,运行后可直观看到手部 26 个骨骼点(对应SkeletonIndexFlag枚举,如掌心PALM、食指尖INDEX_FINGER_TIP)。
3.4 步骤2:核心脚本开发
创建脚本 UXR3_GrabLogic,挂载到“GrabCube”上。核心逻辑:通过 GesEventInput 获取手势类型+置信度,结合骨骼点位置实现“捏合抓取→跟随→握拳释放”,融入 UXR 3.0 置信度过滤,避免误触发。
using Rokid.UXR.Module;
using UnityEngine;
public class UXR3_GrabLogic : MonoBehaviour
{
[Header("UXR 3.0 抓取配置")]
public HandType targetHand = HandType.RightHand; // 目标手(默认右手)
public float followSensitivity = 0.1f; // 跟随灵敏度(值越小越平缓)
public float minConfidence = 0.8f; // 最小手势置信度(低于则不响应)
private bool isGrabbed = false;
private Vector3 lastPalmPos; // 上一帧掌心位置(用于计算跟随位移)
private MeshRenderer cubeRenderer; // 立方体渲染器(用于视觉反馈)
void Start()
{
// 初始化组件引用
cubeRenderer = GetComponent<MeshRenderer>();
cubeRenderer.material.color = Color.white; // 默认颜色
// 初始化掌心位置(获取掌心骨骼点,对应文档 SkeletonIndexFlag.PALM)
if (GesEventInput.Instance.IsHandDataValid(targetHand))
{
lastPalmPos = GesEventInput.Instance.GetSkeletonPose(SkeletonIndexFlag.PALM, targetHand).position;
}
}
void Update()
{
// 1. 校验手部数据有效性(UXR 3.0 新增接口,避免空引用)
if (!GesEventInput.Instance.IsHandDataValid(targetHand))
{
if (isGrabbed) ReleaseCube(); // 手部丢失时自动释放
return;
}
// 2. 获取当前手势类型与置信度(UXR 3.0 核心接口)
GestureType currentGes = GesEventInput.Instance.GetGestureType(targetHand);
float currentConf = GesEventInput.Instance.GetGestureConfidence(targetHand);
// 3. 手势判断:置信度达标才执行逻辑
if (currentConf < minConfidence) return;
// 抓取:捏合手势(GestureType.Pinch)
if (currentGes == GestureType.Pinch && !isGrabbed)
{
GrabCube();
}
// 释放:握拳手势(GestureType.Grip)
else if (currentGes == GestureType.Grip && isGrabbed)
{
ReleaseCube();
}
// 4. 抓取状态下:跟随掌心移动
if (isGrabbed)
{
FollowPalm();
// 调试:绘制掌心到食指尖的连线(直观查看骨骼点位置)
DrawSkeletonDebugLine();
}
}
/// <summary>
/// 抓取立方体:改变颜色+标记状态
/// </summary>
private void GrabCube()
{
isGrabbed = true;
cubeRenderer.material.color = Color.red;
Debug.Log($"抓取成功!手势置信度:{GesEventInput.Instance.GetGestureConfidence(targetHand):F2}");
// 更新初始掌心位置(避免抓取瞬间位移过大)
lastPalmPos = GesEventInput.Instance.GetSkeletonPose(SkeletonIndexFlag.PALM, targetHand).position;
}
/// <summary>
/// 释放立方体:恢复颜色+重置状态
/// </summary>
private void ReleaseCube()
{
isGrabbed = false;
cubeRenderer.material.color = Color.white;
Debug.Log("释放立方体");
}
/// <summary>
/// 跟随掌心移动:基于掌心骨骼点位置计算位移
/// </summary>
private void FollowPalm()
{
Vector3 currentPalmPos = GesEventInput.Instance.GetSkeletonPose(SkeletonIndexFlag.PALM, targetHand).position;
// 计算位移=当前掌心位置 - 上一帧位置,乘以灵敏度
Vector3 moveDelta = (currentPalmPos - lastPalmPos) * followSensitivity;
// 驱动物体移动
transform.position += moveDelta;
// 更新上一帧位置
lastPalmPos = currentPalmPos;
}
/// <summary>
/// 调试:绘制掌心到食指尖的骨骼连线(红色)
/// </summary>
private void DrawSkeletonDebugLine()
{
Pose palmPose = GesEventInput.Instance.GetSkeletonPose(SkeletonIndexFlag.PALM, targetHand);
Pose indexTipPose = GesEventInput.Instance.GetSkeletonPose(SkeletonIndexFlag.INDEX_FINGER_TIP, targetHand);
Debug.DrawLine(palmPose.position, indexTipPose.position, Color.red);
}
}
3.5 步骤3:远近场控制
方案1:保留默认自动切换(适合新手)
无需额外代码,InteractorStateChange 脚本会自动根据距离切换:
- 手靠近 Cube(<0.8m):启用
PokeInteractor(近场抓取,Cube 变红跟随); - 手远离 Cube(>0.8m):启用
RayInteractor(远场射线,可点击 Cube 触发颜色变化)。
方案2:自定义强制近场(适合特定场景)
若只需近场抓取,无需远场,可通过代码禁用远场组件:
在 UXR3_GrabLogic 的 Start() 中添加:
// 找到右手的 RayInteractor(远场)并禁用
var rayInteractor = GameObject.Find("RKHand/RightHandInteractors")?.GetComponent<RayInteractor>();
if (rayInteractor != null) rayInteractor.enabled = false;
3.6 步骤4:运行测试与验证
- 设备连接:用 Type-C 线连接 Station Pro 与电脑,Unity 中选择“Build And Run”,安装 APK 到设备;
- 功能验证:
- 骨骼可视化:戴眼镜后,右手伸出,可看到红色骨骼点连线;
- 抓取:右手捏合(置信度>80%),Cube 变红并跟随掌心移动;
- 释放:右手握拳,Cube 变白并停止跟随;
- 远近场切换(方案1):手远离 Cube 到 1m 外,射线自动激活,点击 Cube 可触发颜色变化。
四、版本避坑指南:新手常遇问题
4.1 问题排查总流程图(先定位再解决)
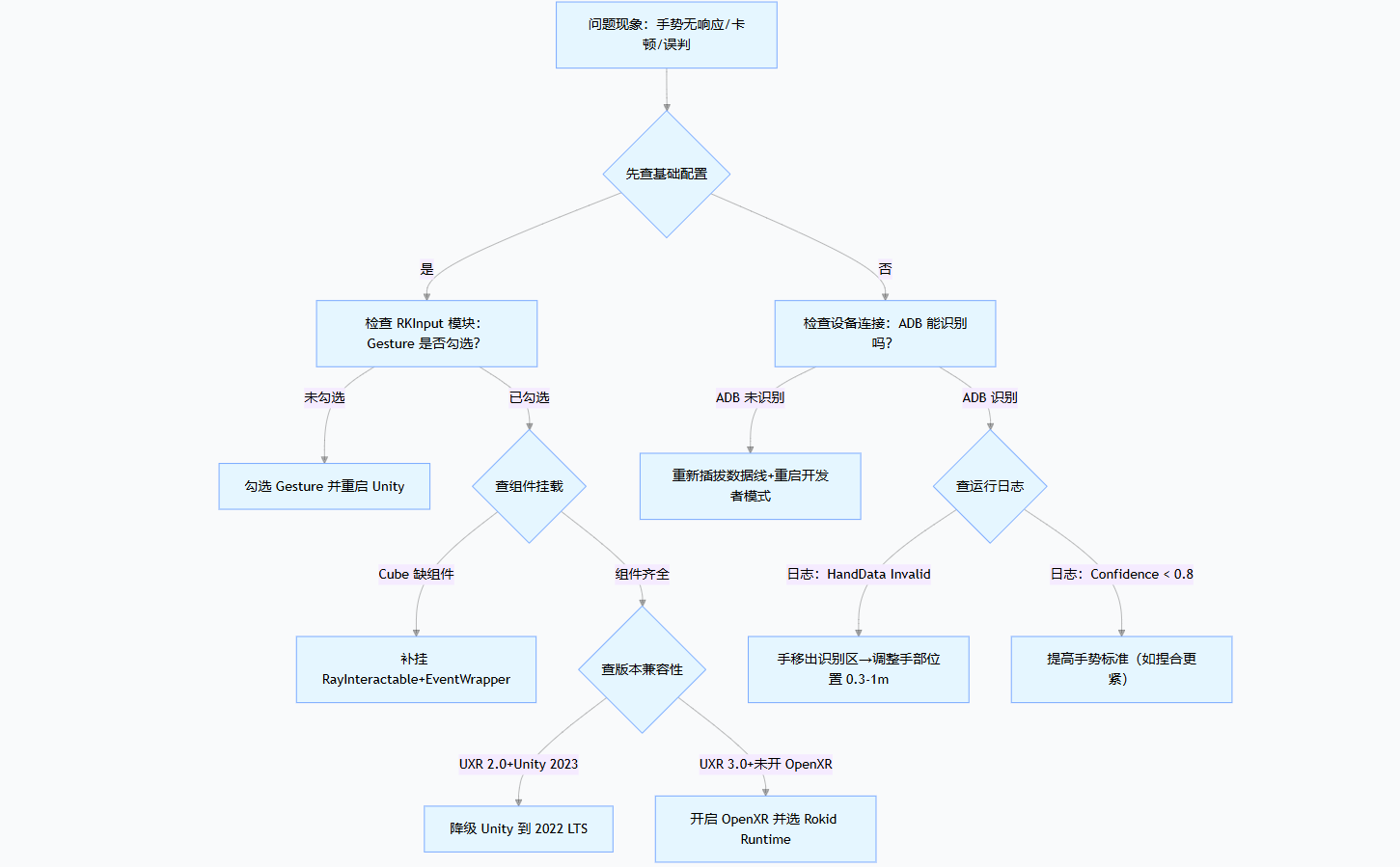
4.2 高频问题明细
问题1:SDK 导入后找不到「RKInput」预制体
| 类别 | 根因分析 | UXR 2.0 解决方案 | UXR 3.0 解决方案 |
|---|---|---|---|
| 现象 | 1. SDK 未完全导入;2. 路径错误;3. 版本不兼容 | 1. 重新拖入 SDK 文件夹,确保「Import All」; 2. 手动路径: Assets/Rokid/UXR/Resources/Prefabs/Input;3. 确认 Unity 是 2020-2022 LTS |
1. 重新导入 UPM 包(删除后重新添加 Git 地址); 2. 手动路径: Packages/Rokid XR/UXR/Resources/Prefabs/Input;3. 确认 OpenXR 已安装 |
| 预防措施 | - 导入时关闭 Unity 其他窗口; - 记录预制体路径到记事本 |
问题2:真机运行后,Cube 不跟随手部移动(无报错)
| 类别 | 根因分析 | UXR 2.0 解决方案 | UXR 3.0 解决方案 |
|---|---|---|---|
| 现象 | 1. 手部未进入识别区;2. 灵敏度太低;3. 事件未绑定 | 1. 手放在相机前方 0.3-1m,掌心朝设备; 2. 脚本中 dragSensitivity 设为 0.15;3. 检查 EventWrapper 的事件是否绑定(WhenSelect 等) |
1. 同 2.0,但识别区扩大到 0.2-1.2m; 2. dragSensitivity 设为 0.1(3.0 灵敏度默认更低);3. 检查「Gesture Confidence Threshold」是否>0.9(过高会过滤有效手势) |
| 调试技巧 | 1. UXR 2.0:在 Update 加 Debug.Log(handPos);2. UXR 3.0:开启骨骼可视化,看掌心点是否移动 |
问题3:打包 APK 后,手势突然无响应(编辑器中正常)
| 类别 | 根因分析 | UXR 2.0 解决方案 | UXR 3.0 解决方案 |
|---|---|---|---|
| 现象 | 1. Android 权限未加;2. 系统版本过低;3. 打包配置错误 | 1. 在 AndroidManifest.xml 加权限:<uses-permission android:name="android.permission.CAMERA"/>;2. 设备系统升级到 ≥ v1.8.0; 3. 确认「Target API Level」是 31 |
1. 同 2.0,额外加 OpenXR 权限:<uses-feature android:name="android.hardware.vr.high_performance"/>;2. 设备系统升级到 ≥ v2.0.0; 3. 打包时选择「Build App Bundle (Google Play)」 |
| 验证方法 | 安装 APK 后,在「设置→应用→权限」中确认「相机」已开启 |
问题4:UXR 3.0 中骨骼点不显示(SkeletonLine 已勾选)
| 类别 | 根因分析 | 解决方案(仅 UXR 3.0) |
|---|---|---|
| 现象 | 1. HandRender 组件未启用;2. 骨骼点数据未获取;3. 颜色与背景一致 | 1. 找到 RKHand → RightHandRender,确认 HandRender 组件「Enabled」勾选;2. 在脚本中加 Debug.Log(GesEventInput.Instance.IsHandDataValid(HandType.RightHand)),确认返回 true;3. 调整 SkeletonLine 的「Line Color」为红色(默认白色可能与背景融合) |
| 预防措施 | 初始化时调用 ToggleSkeletonVisual(true) 脚本方法 |
4.3 开发者论坛提问
如果以上方案都没有解决你的问题,你还可以前往 Rokid 官方论坛发帖提问,邀请论坛里的各路技术大神共同探讨,助力问题解决。
- 访问https://forum.rokid.com/index;
- 选择「技术求助」分类,标题格式:「【UXR X.0】+ 问题现象」(如「【UXR 3.0】Cube 不跟随手部」);
- 内容需包含:Unity 版本、SDK 版本、设备型号、报错日志(从 Android Studio Logcat 导出)。

五、总结
拆解完技术后,你是不是发现 Rokid 手势识别的 “核心秘密” 其实很简单?Rokid 早已将复杂的底层技术 “化繁为简”,而剩下的无限可能,就全靠你的创意去延伸 —— 比如用手势轻松操控虚拟台灯,或是通过手势趣味玩转 AR 积木,让 AR 真正融入你的日常生活。现在就用 Rokid,去开发属于你的创意项目吧!

附录
除此之外,我还为大家整理梳理了核心资源合集,涵盖部署配置规范、开发工具包等关键内容,希望能为各位的 Rokid 开发工作提供帮助。
| 资源名称 | 链接 | 资源介绍 |
|---|---|---|
| UXR3.0开发工具包 | 【一键直达】 | XR3.0 SDK是Rokid为Unity开发者提供的AR开发工具包,提供空间定位跟踪、双目渲染、手势交互等能力;UXR3.0 SDK的运行平台为Rokid AR Studio/AR Lite 。支持 Unity2022 LTS 版本。 |
| Rokid若琪学院 | 【一键直达】 | 官方学习资源,包括XR知识讲解,Rokid设备知识、空间多模态交互使用手势交互、射线、语音等。 |
| YodaOS-Master 系统说明书 | 【一键直达】 | YodaOS-Master是一套以空间交互为核心的AR空间计算操作系统。包括空间定位、空间交互、空间音频、空间渲染和空间显示等能力。 |
| SDK下载 | 【一键直达】 | Rokid 全系列设备软件开发工具包(SDK)汇总 |
| RoKid开发者论坛 | 【一键直达】 | 连接开发者与官方的核心支持与交流平台 |
| 开发者常见FAQ | 【一键直达】 | Rokid 开发者常见 FAQ 集合,整合开发全流程高频疑问的官方标准化解答。 |

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐



 129
129 0
0- 0



 已为社区贡献6条内容
已为社区贡献6条内容

所有评论(0)