Opencv(十四) : 图像噪点消除
人工智能领域机器视觉里图像噪点消除内容
文章目录
前言
在机器视觉和图像处理领域,图像噪点是影响后续分析精度的关键问题。无论是工业相机采集的产品图像、安防监控画面,还是日常拍摄的照片,都可能因设备性能、传输干扰、光照变化等因素产生噪声。
一、图像噪声基础概念
1.1 噪声定义与本质
图像噪声是指图像中存在的干扰有效信息的随机信号,表现为像素值与周围正常像素存在明显差异的离散点或区域。从本质上讲,噪声是图像采集、传输或处理过程中引入的无用信号,会导致图像清晰度下降、细节丢失,甚至影响后续的特征提取、目标检测等高级任务。
1.2 常见噪声类型
实际应用中,图像噪声主要分为两类,其特征和产生原因存在显著差异:
- 高斯噪声:噪声分布符合正态分布(高斯分布),表现为图像整体呈现均匀的颗粒感,使画面变得模糊。产生原因主要包括图像传感器的热噪声、光照不足导致的电子噪声,以及传输过程中的信道干扰。例如,在低光环境下使用手机拍摄的照片,常常会出现这种均匀的“雪花状”噪点。
- 椒盐噪声:又称脉冲噪声,表现为图像中随机分布的黑色(像素值接近0)或白色(像素值接近255)斑点,如同在图像上撒了一把盐和胡椒粉。其产生原因主要包括传感器故障、传输线路中的脉冲干扰、图像量化误差等。例如,工业相机拍摄金属表面时,可能因反光或传感器异常产生此类噪声。
1.3 滤波与噪声消除的关系
滤波是消除图像噪声的核心技术,其本质是通过一定的数学运算,对图像像素进行局部处理,抑制噪声信号的同时尽可能保留有效信息。滤波过程可理解为:用一个固定大小的“窗口”(称为卷积核)在图像上从左至右、从上至下滑动,对窗口覆盖的像素区域进行计算,并用计算结果替换窗口中心像素的值,从而实现噪声的平滑消除。
1.4 滤波与模糊、锐化的关联
很多初学者会混淆滤波、模糊和锐化的概念,其实三者都属于卷积运算的应用,核心区别在于卷积核的设计:
- 滤波是广义概念,包括噪声抑制(低通滤波)和细节增强(高通滤波)两类;
- 低通滤波:允许图像中的低频信号(平缓变化的区域)通过,抑制高频信号(噪声、边缘),从而实现噪声消除和图像平滑,本质上是一种模糊操作;
- 高通滤波:与低通滤波相反,允许高频信号通过,增强图像边缘和细节,实现锐化效果,常用于噪声消除后的细节恢复。
二、滤波算法核心基础
2.1 卷积核与滑动窗口
卷积核(又称滤波器模板)是滤波算法的核心,是一个固定大小的矩阵(如3×3、5×5),矩阵中的每个元素称为权重值。滤波过程中,卷积核作为滑动窗口,其中心对准当前处理的像素,窗口覆盖的所有像素与对应权重值相乘后求和(或其他运算),结果即为中心像素的新值。
例如,3×3的卷积核在4×4的图像上滑动时,需要对图像边界进行填充(称为边界填充),确保卷积核能够完整覆盖边界像素。常用的边界填充方式包括BORDER_REFLECT_101(镜像填充)和BORDER_REPLICATE(复制填充),不同滤波算法的默认填充方式会在后续章节详细说明。
2.2 滤波算法的分类
根据运算方式的不同,常用的滤波算法可分为线性滤波和非线性滤波两大类,其核心区别在于是否对像素值进行线性组合运算:
- 线性滤波:对窗口内的像素值进行加权求和等线性运算,卷积核权重固定。优点是计算速度快,适合处理均匀分布的噪声;缺点是容易模糊图像边缘细节。常见类型包括均值滤波、方框滤波、高斯滤波。
- 非线性滤波:通过像素值的排序、统计等非线性运算得到结果,不依赖固定的卷积核权重。优点是能在消除噪声的同时保留边缘信息,适合处理脉冲类噪声;缺点是计算复杂度较高,运算速度相对较慢。常见类型包括中值滤波、双边滤波。
三、5种主流滤波算法详解
3.1 均值滤波(Mean Filter)
3.1.1 算法原理
均值滤波是最简单的线性滤波算法,其核心思想是“局部平均”:对于每个像素,用其周围邻域内所有像素值的平均值作为该像素的新值。以3×3卷积核为例,其权重矩阵如下: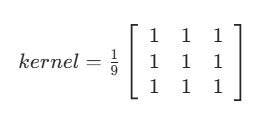
该矩阵表示,窗口内每个像素的权重相等(均为1/9),中心像素的新值等于窗口内9个像素值的总和除以9。
3.1.2 关键参数
在滤波算法组件中,均值滤波的参数配置非常简洁,仅需设置一个核心参数:
- ksize:卷积核的大小,常用值为3(3×3)、5(5×5)、7(7×7)等奇数。ksize越大,滤波效果越强(噪声消除越彻底),但图像模糊程度也会越严重,细节丢失越多。例如,ksize=3时,滤波后图像细节保留较好;ksize=7时,噪声消除更彻底,但边缘会明显模糊。
3.1.3 运算过程
以4×4图像为例,使用3×3卷积核进行均值滤波的具体步骤如下:
- 对图像进行边界填充(默认使用BORDER_REFLECT_101镜像填充),确保卷积核能够覆盖图像四个角落的像素;
- 将3×3卷积核的中心对准图像的第一个像素(非边界像素),计算窗口内9个像素值的总和;
- 将总和除以9,得到的平均值作为中心像素的新值;
- 卷积核从左至右、从上至下滑动,重复步骤2-3,直至遍历完整个图像,最终得到滤波后的4×4图像。
3.1.4 优缺点与适用场景
- 优点:算法简单易懂,计算量小,运算速度快,适合实时处理场景;对高斯噪声有一定的抑制效果。
- 缺点:对所有像素一视同仁地加权平均,会同时模糊噪声和图像边缘、细节,导致图像整体变得模糊,细节丢失严重。
- 适用场景:对图像清晰度要求不高,仅需快速消除轻微高斯噪声的场景,例如监控画面的实时降噪、低精度图像的预处理等。
3.2 方框滤波(Box Filter)
3.2.1 算法原理
方框滤波是均值滤波的扩展形式,核心思想与均值滤波类似,都是对窗口内的像素进行求和运算,但通过参数控制是否对求和结果进行归一化。其3×3卷积核的一般形式如下: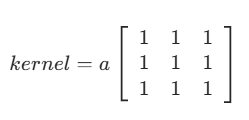
其中,a为归一化系数,其值由参数normalize决定,这是方框滤波与均值滤波的核心区别。
3.2.2 关键参数
方框滤波的参数相对丰富,包括3个核心参数,需根据实际需求灵活配置:
- ksize:卷积核大小,与均值滤波一致,常用3×3、5×5等奇数尺寸,决定了滤波窗口的范围。
- ddepth:输出图像的深度,即像素值的位数(如8位、16位),取值为-1时表示使用原图像的深度,无需额外转换,是最常用的配置。
- normalize:归一化开关,布尔值(True/False):
- 当normalize=True时,a=1/(ksize×ksize),此时方框滤波等价于均值滤波,求和后除以窗口内像素总数,得到平均值;
- 当normalize=False时,a=1,此时方框滤波直接计算窗口内像素值的总和,不进行归一化,适用于需要保留像素值总和特征的场景(如亮度检测)。
3.2.3 运算过程
方框滤波的运算流程与均值滤波基本一致,具体步骤如下:
- 采用BORDER_REFLECT_101方式进行边界填充(与均值滤波默认填充方式相同);
- 卷积核在图像上滑动,覆盖当前像素的邻域区域;
- 根据normalize参数选择运算方式:若归一化则计算加权平均(权重均为1/(ksize×ksize)),若不归一则计算像素值总和;
- 将计算结果作为中心像素的新值,完成整个图像的遍历。
3.2.4 优缺点与适用场景
- 优点:灵活性高,可通过normalize参数切换“均值计算”和“总和计算”两种模式;运算速度与均值滤波相当,适合批量处理。
- 缺点:同样属于线性滤波,会模糊图像边缘和细节;当normalize=False时,可能因像素值总和过大导致图像过亮(像素值溢出)。
- 适用场景:
- normalize=True时,与均值滤波适用场景一致,可用于轻微高斯噪声的快速消除;
- normalize=False时,适用于需要保留区域亮度总和的场景,如工业图像中的光斑检测、目标面积计算等。
3.3 高斯滤波(Gaussian Filter)
3.3.1 算法原理
高斯滤波是应用最广泛的线性滤波算法,其核心改进在于卷积核的权重分布:不再采用均值滤波和方框滤波的均匀权重,而是基于高斯函数设计权重矩阵,使窗口中心像素的权重最大,越远离中心的像素权重越小,呈正态分布。
这种权重分布的优势在于:在抑制噪声的同时,能更好地保留图像的细节信息,因为中心像素(有效信息的核心)在计算中占据主导地位。3×3高斯滤波的标准卷积核如下: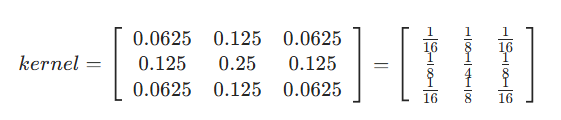
卷积核的权重值通过高斯函数计算得到。高斯函数的二维形式为: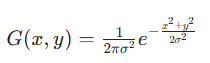
其中,(x,y)是卷积核中像素相对于中心的坐标(中心像素坐标为(0,0)),σ(sigma)是高斯分布的标准差,决定了权重的衰减速度。
3.3.2 关键参数
高斯滤波的参数配置直接影响滤波效果,核心参数包括2个:
- ksize:卷积核大小,常用3×3、5×5、7×7等奇数。需要注意的是,当ksize大于7且未手动设置σ时,系统会通过固定公式自动计算σ值(通常为ksize/6),确保权重分布合理。
- sigmaX:高斯分布在x方向的标准差(由于图像是二维的,通常默认x和y方向的标准差相同,即sigmaY=sigmaX)。sigmaX的值越大,权重衰减越慢,卷积核的影响范围越广,图像模糊效果越明显;sigmaX越小,权重越集中在中心,细节保留越好,但噪声抑制效果会减弱。
3.3.3 运算过程
高斯滤波的运算流程与前两种线性滤波类似,但增加了卷积核权重的计算步骤:
- 根据ksize和sigmaX参数,通过高斯函数生成对应的权重矩阵(卷积核);
- 对图像进行BORDER_REFLECT_101边界填充;
- 卷积核在图像上滑动,将窗口内每个像素值与对应权重相乘后求和;
- 求和结果作为中心像素的新值,完成整个图像的滤波处理。
3.3.4 优缺点与适用场景
- 优点:噪声抑制效果好,尤其对高斯噪声的消除能力突出;权重分布合理,相比均值滤波和方框滤波,能更好地保留图像细节,是兼顾降噪和细节保留的平衡选择;
- 缺点:卷积核权重计算复杂,运算速度比均值滤波和方框滤波慢;对椒盐噪声的抑制效果有限。
- 适用场景:高斯噪声为主的图像降噪,如低光环境下的照片处理、工业相机采集的产品图像预处理、医学影像(如X光片、CT图像)的噪声消除等。由于其优秀的综合性能,高斯滤波被称为“最有用的滤波器”,在不确定噪声类型时,可作为首选的降噪算法。
3.4 中值滤波(Median Filter)
3.4.1 算法原理
中值滤波是一种经典的非线性滤波算法,与线性滤波的核心区别在于:不进行像素值的加权求和,而是对窗口内的像素值进行排序后,取中间值作为中心像素的新值。
例如,使用3×3窗口处理某区域像素时,先将窗口内的9个像素值按从小到大排序,取第5个值(中位数)替换中心像素的原始值。这种非线性运算的优势在于:能有效剔除异常值(如椒盐噪声的黑白斑点),同时保留边缘细节,因为异常值在排序后会处于序列的两端,不会影响中间值的选择。
3.4.2 关键参数
中值滤波的参数相对简单,仅需配置1个核心参数:
- ksize:卷积核(窗口)大小,常用3×3、5×5等奇数。与线性滤波不同,中值滤波的ksize对效果影响显著:ksize越小,细节保留越好,但噪声抑制能力较弱;ksize越大,噪声消除越彻底,但可能导致图像边缘出现“块状”失真。
需要注意的是,中值滤波的边界填充方式与其他线性滤波不同,默认采用BORDER_REPLICATE(复制填充),即复制图像边界的像素值来填充窗口,确保边界处理的一致性。
3.4.3 运算过程
中值滤波的运算流程与线性滤波差异较大,具体步骤如下:
- 采用BORDER_REPLICATE方式进行边界填充;
- 卷积核在图像上滑动,覆盖当前像素的邻域区域;
- 提取窗口内所有像素的数值,进行升序(或降序)排序;
- 选取排序后的中间值(若窗口内像素数为偶数,则取中间两个值的平均或任意一个中间值),作为中心像素的新值;
- 重复上述步骤,直至遍历完整个图像。
3.4.4 优缺点与适用场景
- 优点:对椒盐噪声和斑点噪声的抑制效果极佳,是处理这类噪声的首选算法;非线性运算不会模糊图像边缘,能有效保留细节信息;算法逻辑简单,易于实现。
- 缺点:运算速度比线性滤波慢,因为需要进行排序操作,尤其当ksize较大时,计算量显著增加;对高斯噪声的抑制效果不如高斯滤波。
- 适用场景:椒盐噪声、斑点噪声为主的图像降噪,如工业监控图像、印刷品扫描图像、遥感图像等。例如,处理因传感器故障导致的黑白斑点图像,中值滤波能在剔除噪声的同时,保持目标物体的边缘清晰。
3.5 双边滤波(Bilateral Filter)
3.5.1 算法原理
前面介绍的线性滤波(均值、方框、高斯)都存在一个共同的问题:在消除噪声的同时,会模糊图像的边缘细节,因为它们仅考虑了像素的空间位置(空域信息),而忽略了像素值的差异(值域信息)。双边滤波的核心创新的是:同时考虑空域信息和值域信息,在抑制噪声的同时,最大限度地保留边缘细节。
双边滤波的原理是结合两个高斯滤波器:
- 空域高斯滤波器:与普通高斯滤波一致,基于像素的空间距离计算权重,距离中心越近的像素权重越大;
- 值域高斯滤波器:基于像素值的相似度计算权重,像素值与中心像素越接近,权重越大。
最终的权重的是空域权重和值域权重的乘积,公式如下:
其中, 
(空域权重,(i,j)为中心像素坐标,(k,l)为邻域像素坐标),
(值域权重,f(i,j)为中心像素值,f(k,l)为邻域像素值)。
通过这种双重权重计算,双边滤波在处理边缘区域时,由于边缘两侧的像素值差异较大,值域权重会显著降低,从而避免边缘被模糊;而在平坦区域,像素值差异小,值域权重接近1,滤波效果与高斯滤波类似,能有效抑制噪声。
3.5.2 关键参数
双边滤波的参数较多,需要根据图像特点和需求灵活调整,核心参数包括4个:
- ksize:卷积核大小,常用3×3、5×5、9×9等奇数。ksize越大,滤波范围越广,但运算速度越慢。
- d:邻域直径,即每个像素的邻域范围大小。d值越大,参与计算的邻域像素越多,降噪效果越强,但运算效率越低。实际应用中,实时场景建议d=5,离线处理严重噪声时可设d=9。
- sigmaColor:颜色空间的标准差,决定了像素值相似度的权重衰减速度。sigmaColor越大,允许更多像素值差异较大的像素参与滤波(即“颜色混合范围更广”);sigmaColor越小,仅允许像素值接近的像素参与计算,边缘保留效果更明显。
- sigmaSpace:坐标空间的标准差,与高斯滤波的sigmaX作用类似,决定了空间距离的权重衰减速度。sigmaSpace越大,空间距离较远的像素也会对中心像素产生影响;sigmaSpace越小,权重越集中在中心像素附近。
关于参数配置的经验法则:
- 通常将sigmaColor和sigmaSpace设置为相等的值,简化调整过程;
- 当sigmaColor和sigmaSpace小于10时,滤波效果微弱;大于150时,滤波效果过强,图像会呈现“卡通化”效果;
- 避免设置过大的d值(d>5),否则会导致运算速度急剧下降,影响实时性。
3.5.3 运算过程
双边滤波的运算流程相对复杂,具体步骤如下:
- 采用BORDER_REFLECT_101方式进行边界填充;
- 卷积核在图像上滑动,确定中心像素(i,j)及其邻域像素(k,l);
- 计算每个邻域像素的空域权重ωs(基于空间距离)和值域权重ωr(基于像素值差异);
- 计算最终权重ω=ωs×ωr,并对所有邻域像素的权重进行归一化(权重总和为1);
- 邻域像素值与对应归一化权重相乘后求和,结果作为中心像素的新值;
- 重复上述步骤,完成整个图像的滤波处理。
3.5.4 优缺点与适用场景
- 优点:能在抑制噪声的同时,最大限度地保留图像边缘细节,解决了线性滤波“降噪必模糊边缘”的痛点;对高斯噪声和轻微椒盐噪声都有较好的抑制效果。
- 缺点:计算复杂度高,运算速度是所有滤波算法中最慢的;参数调整复杂,需要多次实验才能达到最佳效果。
- 适用场景:对边缘细节要求高的图像降噪,如人脸识别中的面部图像预处理、文物修复中的图像去噪、工业检测中的产品边缘保留、航拍图像的细节增强等。
四、5种滤波算法对比分析
4.1 核心特性对比
为了方便大家快速选择合适的滤波算法,下面从滤波类型、核心思想、权重特点、边缘保留、运算速度等维度进行综合对比:
| 算法类型 | 滤波类型 | 核心思想 | 权重特点 | 边缘保留效果 | 运算速度 |
|---|---|---|---|---|---|
| 均值滤波 | 线性 | 邻域像素平均值 | 均匀权重 | 差(模糊边缘) | 最快 |
| 方框滤波 | 线性 | 邻域像素求和(可归一化) | 均匀权重(可切换归一化) | 差(模糊边缘) | 快 |
| 高斯滤波 | 线性 | 邻域像素加权平均(高斯权重) | 中心权重最大,边缘权重递减 | 一般(轻微模糊) | 中等 |
| 中值滤波 | 非线性 | 邻域像素排序取中值 | 无固定权重(依赖排序) | 好(保留边缘) | 较慢 |
| 双边滤波 | 非线性 | 空域+值域双重权重加权平均 | 动态权重(随像素位置和值变化) | 最好(精准保留) | 最慢 |
4.2 噪声适配性对比
不同滤波算法对高斯噪声和椒盐噪声的抑制效果差异显著,具体适配性如下:
| 算法类型 | 高斯噪声抑制效果 | 椒盐噪声抑制效果 | 最佳适配噪声类型 |
|---|---|---|---|
| 均值滤波 | 一般 | 差 | 轻微高斯噪声 |
| 方框滤波 | 一般 | 差 | 轻微高斯噪声 |
| 高斯滤波 | 好 | 一般 | 高斯噪声 |
| 中值滤波 | 一般 | 好 | 椒盐噪声、斑点噪声 |
| 双边滤波 | 好 | 一般 | 高斯噪声(需保留边缘) |
4.3 实用选择策略
根据实际应用场景,可按照以下策略快速选择滤波算法:
- 若不确定噪声类型,优先选择高斯滤波(综合性能最优),其次是均值滤波(快速降噪);
- 若明确是椒盐噪声或斑点噪声,直接选择中值滤波(针对性最强);
- 若需要在降噪的同时保留边缘细节(如目标检测、特征提取前的预处理),选择双边滤波;
- 若追求运算速度(如实时监控、批量处理),选择均值滤波或方框滤波(normalize=True);
- 若需要计算区域像素总和(如亮度分析、面积检测),选择方框滤波(normalize=False)。
五、图像噪点消除实验操作指南
5.1 实验结果分析
5.1.1 不同算法处理效果对比
以含高斯噪声和椒盐噪声的图像为例,不同滤波算法的处理效果如下:
- 均值滤波:噪声有所抑制,但图像整体模糊,边缘细节丢失;
- 方框滤波(normalize=True):效果与均值滤波类似,噪声抑制和模糊程度基本一致;
- 高斯滤波:高斯噪声抑制效果明显,图像模糊程度低于均值滤波,细节保留更好;
- 中值滤波:椒盐噪声的黑白斑点完全消失,边缘细节清晰,但图像整体略有“块状”感;
- 双边滤波:高斯噪声得到有效抑制,图像边缘细节几乎完全保留,整体清晰度最高。
5.1.2 参数调整对效果的影响
以高斯滤波为例,不同参数配置的效果差异:
- ksize=3,sigmaX=0.5:噪声抑制效果较弱,但细节保留最好;
- ksize=5,sigmaX=1.5:噪声抑制和细节保留达到平衡,适合大多数场景;
- ksize=7,sigmaX=3.0:噪声抑制效果最强,但图像模糊程度明显增加,细节丢失较多。
以双边滤波为例,sigmaColor和sigmaSpace的影响:
- sigmaColor=30,sigmaSpace=30:边缘保留效果好,但噪声抑制不足;
- sigmaColor=50,sigmaSpace=50:噪声抑制和边缘保留平衡;
- sigmaColor=100,sigmaSpace=100:噪声抑制效果强,但图像出现轻微“卡通化”。
六、Python代码实现与实战案例
本节将基于OpenCV库,实现5种滤波算法的Python代码,并提供完整的实战案例,包括图像读取、滤波处理、结果显示和保存,方便大家直接运行和修改。
6.1 环境准备
首先确保已安装OpenCV库,若未安装,可通过以下命令安装:
pip install opencv-python
6.2 完整代码实现
以下代码实现了均值滤波、方框滤波、高斯滤波、中值滤波、双边滤波的完整流程,包含参数配置、效果对比和结果保存:
import cv2
import numpy as np
import matplotlib.pyplot as plt # 用于合并显示多子图
def load_image(image_path):
"""读取图像,返回BGR格式的图像数组(OpenCV默认)"""
image = cv2.imread('lena.png')
if image is None:
raise ValueError("无法读取图像,请检查路径是否正确或图像格式是否支持(优先png/jpg)")
return image
def mean_filter(image, ksize=3):
"""均值滤波:邻域像素取平均,简单快速但易模糊细节"""
return cv2.blur(image, (ksize, ksize))
def box_filter(image, ksize=3, ddepth=-1, normalize=True):
"""方框滤波:可切换归一化(等价均值滤波)/非归一化(像素求和)"""
return cv2.boxFilter(image, ddepth, (ksize, ksize), normalize=normalize)
def gaussian_filter(image, ksize=3, sigmaX=1.5):
"""高斯滤波:中心像素权重高,兼顾降噪与细节保留,适合高斯噪声"""
return cv2.GaussianBlur(image, (ksize, ksize), sigmaX)
def median_filter(image, ksize=3):
"""中值滤波:邻域像素排序取中值,擅长消除椒盐噪声,无边缘模糊"""
return cv2.medianBlur(image, ksize)
def bilateral_filter(image, d=5, sigmaColor=50, sigmaSpace=50):
"""双边滤波:结合空域+值域权重,降噪同时精准保留边缘细节"""
return cv2.bilateralFilter(image, d, sigmaColor, sigmaSpace)
def merge_and_show_results(original, mean_img, box_img, gaussian_img, median_img, bilateral_img,
save_path="./results/"):
"""
合并显示所有结果(单图多子图)+ 保存单张结果图
参数:
original: 原始图像(BGR格式)
mean_img~bilateral_img: 5种滤波结果(BGR格式)
save_path: 结果保存目录
"""
# 1. 预处理:创建目录 + BGR转RGB(matplotlib默认RGB显示)
import os
if not os.path.exists(save_path):
os.makedirs(save_path) # 不存在则创建结果目录
# OpenCV读取的是BGR格式,matplotlib需转为RGB格式才能正常显示颜色
def bgr2rgb(img):
return cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 转换所有图像格式
original_rgb = bgr2rgb(original)
mean_rgb = bgr2rgb(mean_img)
box_rgb = bgr2rgb(box_img)
gaussian_rgb = bgr2rgb(gaussian_img)
median_rgb = bgr2rgb(median_img)
bilateral_rgb = bgr2rgb(bilateral_img)
# 2. 合并显示:2行3列布局(共6个子图)
plt.figure(figsize=(18, 12)) # 设置整体图大小(宽18英寸,高12英寸),可根据屏幕调整
plt.rcParams['font.sans-serif'] = ['DejaVu Sans', 'SimHei'] # 支持英文/中文标签
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示异常
# 子图1:原始图像
plt.subplot(2, 3, 1) # 第2行、第3列、第1个子图
plt.imshow(original_rgb)
plt.title("Original Image\n(原始图像)", fontsize=14, fontweight='bold')
plt.axis('off') # 隐藏坐标轴,避免干扰视觉
# 子图2:均值滤波
plt.subplot(2, 3, 2)
plt.imshow(mean_rgb)
plt.title("Mean Filter\n(均值滤波:简单快速,细节模糊)", fontsize=14, fontweight='bold')
plt.axis('off')
# 子图3:方框滤波(归一化=均值滤波)
plt.subplot(2, 3, 3)
plt.imshow(box_rgb)
plt.title("Box Filter (Normalized)\n(方框滤波:等价均值,可切换求和模式)", fontsize=14, fontweight='bold')
plt.axis('off')
# 子图4:高斯滤波
plt.subplot(2, 3, 4)
plt.imshow(gaussian_rgb)
plt.title("Gaussian Filter\n(高斯滤波:高斯噪声优选,细节保留好)", fontsize=14, fontweight='bold')
plt.axis('off')
# 子图5:中值滤波
plt.subplot(2, 3, 5)
plt.imshow(median_rgb)
plt.title("Median Filter\n(中值滤波:椒盐噪声克星,无边缘模糊)", fontsize=14, fontweight='bold')
plt.axis('off')
# 子图6:双边滤波
plt.subplot(2, 3, 6)
plt.imshow(bilateral_rgb)
plt.title("Bilateral Filter\n(双边滤波:降噪+边缘保留,效果最佳)", fontsize=14, fontweight='bold')
plt.axis('off')
# 调整子图间距,避免标签重叠
plt.tight_layout(pad=3.0) # pad=3.0:子图间间距(英寸),可按需调整
# 3. 保存结果:同时保存“合并图”和“单张结果图”
# 保存合并图(高清,dpi=300)
merge_save_path = os.path.join(save_path, "all_filters_comparison.png")
plt.savefig(merge_save_path, dpi=300, bbox_inches='tight') # bbox_inches='tight':去除多余空白
print(f"合并对比图已保存至:{merge_save_path}")
# 保存单张结果图(保持原始分辨率)
single_saves = [
(original, "original.jpg", "原始图像"),
(mean_img, "mean_filter.jpg", "均值滤波结果"),
(box_img, "box_filter.jpg", "方框滤波结果"),
(gaussian_img, "gaussian_filter.jpg", "高斯滤波结果"),
(median_img, "median_filter.jpg", "中值滤波结果"),
(bilateral_img, "bilateral_filter.jpg", "双边滤波结果")
]
for img, filename, desc in single_saves:
save_path_single = os.path.join(save_path, filename)
cv2.imwrite(save_path_single, img)
print(f"{desc}已保存至:{save_path_single}")
# 显示合并图(弹窗形式,关闭弹窗后程序继续)
plt.show()
if __name__ == "__main__":
# -------------------------- 配置参数(可按需修改) --------------------------
image_path = "./demo.png" # 测试图像路径(请确保该路径下有demo.png文件)
ksize = 3 # 卷积核大小(建议奇数:3/5/7,越大降噪越强但模糊越明显)
sigmaX = 1.5 # 高斯滤波标准差(越大模糊越强,1.0~2.0为常用范围)
d = 5 # 双边滤波邻域直径(实时场景建议5,离线高噪声场景可设9)
sigmaColor = 50 # 双边滤波颜色相似度权重(50~100,越大颜色混合范围越广)
sigmaSpace = 50 # 双边滤波空间距离权重(50~100,越大空间影响范围越广)
save_root = "./filter_results/" # 结果保存根目录(自动创建)
# ---------------------------------------------------------------------------
# 1. 读取原始图像
try:
original_image = load_image(image_path)
print(f"成功读取原始图像,分辨率:{original_image.shape[1]}x{original_image.shape[0]}(宽x高)")
except ValueError as e:
print(f"图像读取失败:{e}")
exit() # 读取失败则退出程序
# 2. 执行5种滤波算法
mean_result = mean_filter(original_image, ksize=ksize)
box_result = box_filter(original_image, ksize=ksize, normalize=True) # 归一化=均值滤波
gaussian_result = gaussian_filter(original_image, ksize=ksize, sigmaX=sigmaX)
median_result = median_filter(original_image, ksize=ksize)
bilateral_result = bilateral_filter(original_image, d=d, sigmaColor=sigmaColor, sigmaSpace=sigmaSpace)
print("所有滤波算法执行完成,开始合并显示与保存...")
# 3. 合并显示+保存结果
merge_and_show_results(
original=original_image,
mean_img=mean_result,
box_img=box_result,
gaussian_img=gaussian_result,
median_img=median_result,
bilateral_img=bilateral_result,
save_path=save_root
)
print("所有操作完成!")
输出结果为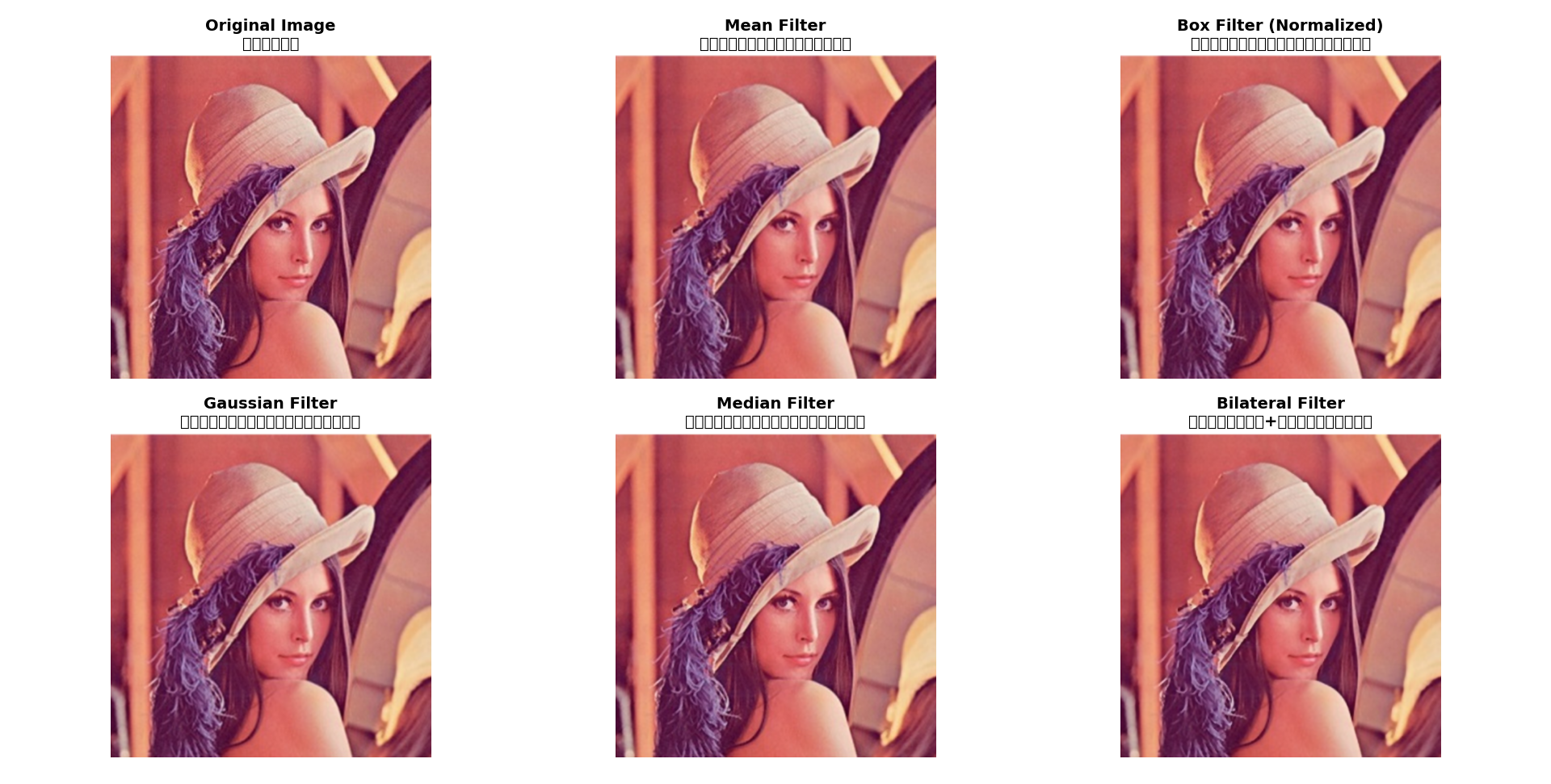
6.3 代码说明与使用指南
6.3.1 核心函数功能
-
load_image:读取图像文件,支持主流格式(png、jpg、jpeg等),并进行路径有效性检查; -
show_and_save_results:统一显示所有滤波结果,并将结果保存到指定目录,支持图像大小调整(避免因图像过大无法完整显示)。
七、总结与拓展
本文全面覆盖了图像噪点消除的核心技术,从基础概念到实战应用,关键要点如下:
- 图像噪声主要分为高斯噪声和椒盐噪声,其产生原因和视觉特征不同,需针对性选择滤波算法;
- 线性滤波(均值、方框、高斯)运算速度快,适合高斯噪声,但会模糊边缘;非线性滤波(中值、双边)能保留边缘,中值滤波对椒盐噪声最优,双边滤波综合性能最佳;
- 参数配置是影响滤波效果的关键,如高斯滤波的sigmaX、双边滤波的sigmaColor和sigmaSpace,需根据图像特点灵活调整;

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐

 28
28 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)