【自动驾驶】Autoware 三大版本 ( Autoware.AI | Autoware.Auto | Autoware Core/Universe )
一、Autoware 三大版本1、版本简介2、Autoware 技术栈3、学习路径建议二、Autoware 各版本详细解析1、Autoware.AI① Autoware.AI 技术特点② Autoware.AI 优缺点③ Autoware.AI 适用场景2、Autoware.Core/Universe① 版本简介② Autoware.Core/Universe 特点③ Autoware.Core/
文章目录
一、Autoware 三大版本
1、版本简介
Autoware 三大版本 :
- Autoware.AI : 基于 ROS 1 ;
- 主要用途 : 主要用于 学术研究、原型验证 ;
- 版本现状 : 已经是 Release 版本 , 停止维护 ;
- GitHub 地址 : https://github.com/autowarefoundation/autoware_ai
- 安装指南 : https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/wikis/home
- Autoware.Auto : 基于 ROS 2 , 属于过渡版本 ;
- 主要用途 : 主要用于 高安全性 和 可靠性的商业应用 , 适合 封闭园区、低速商用 等场景 , 如 : 代客泊车、物流配送 ;
- 版本现状 : 已经是 Release 版本 , 停止维护 ;
- 安装指南 : https://autowarefoundation.gitlab.io/autoware.auto/AutowareAuto/installation-ade.html
- Autoware Core/Universe : 基于 ROS 2 ;
- 主要用途 : 兼顾 稳定核心功能 与 前沿算法试验 ;
- 版本现状 : 目前还在更新完善 ;
- GitHub 地址 : https://github.com/autowarefoundation/autoware
- 文档主页 : https://autowarefoundation.github.io/autoware-documentation/main/ , 该文档 是 支持 Autoware Core/Universe + Ubuntu 22.04 + ROS 2 Humble 的文档 , 包含安装指南、架构说明、模块介绍、传感器配置、仿真测试(如使用 CARLA 或 LGSVL)、实车部署等内容 ;
- 安装指南 : https://autowarefoundation.github.io/autoware-documentation/main/installation/
2、Autoware 技术栈
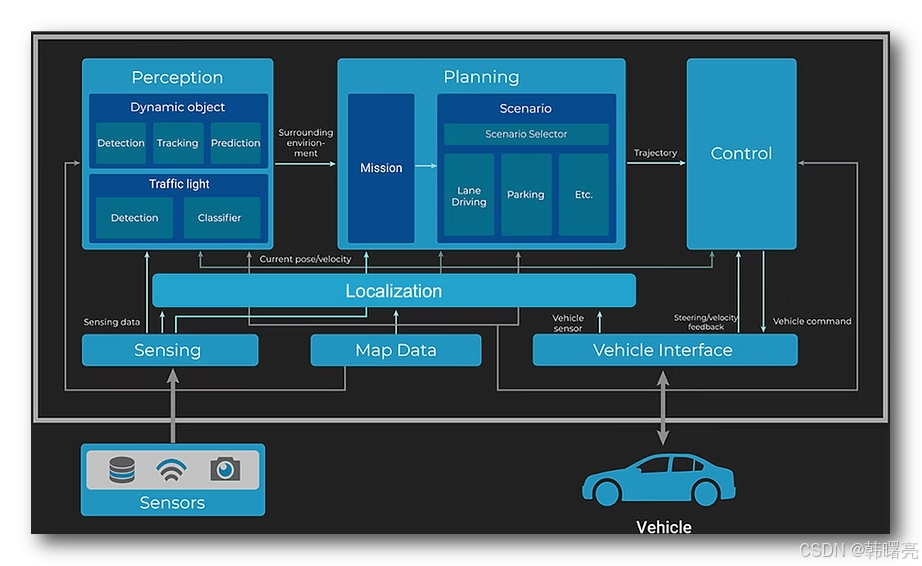
Autoware 三个版本技术栈相同 , 都是基于 高精地图 + 激光雷达 + 摄像头 + 毫米波雷达 + 感知系统 + 预测系统 + 决策规划 + 线控控制 实现的自动驾驶 , 技术架构 如下图所示 ;
- Sensors 传感器 ( 激光雷达 / 摄像头 / 毫米波雷达 ) 采集的数据 是 自动驾驶系统 的 输入 ;
- 自动驾驶系统 的 输出 是 传递给 Vehicle 自动驾驶汽车 的 线控信号 ;
- 定位 是 重中之重 , 如果没有定位信息 , 自动驾驶 系统 直接瘫痪 , 传感器 信号 / 高精地图 / 汽车接口 的 所有信息 汇集在一起 , 必须先实现准确定位 , 如果定位失败 , 则 自动驾驶系统 强制关机 ;
- 定位成功 之后 , 才能考虑 后续的 感知、预测、决策、控制 操作 , 否则 无法执行 自动驾驶操作 ;
- 感知系统 负责 识别 静态的道路信息 , 和 动态的物体 ;
- 决策规划 负责根据不同的任务 , 生成不同的决策 , 然后将这些决策 转为 汽车的线控信号 ;
3、学习路径建议
当前市面上 Autoware.AI 的 学习资料较多 , 有成熟的课程和项目 ;
Autoware Core/Universe 需要去官网查看文档 , 自己按照文档学习 , 学习难度较高 ;
学习推荐 : 对于 自动驾驶领域 的 纯新手 , 建议先学习 Autoware.AI , 学习资料较多 , 课程完善 ; 等熟练使用 Autoware.AI 后 , 自行去官网学习 Autoware Core/Universe ;
商用推荐 : 如果要开发商业项目 , 建议使用 Autoware Core/Universe 版本 ;
二、Autoware 各版本详细解析
1、Autoware.AI
Autoware.AI 起源于 2015 年 , 以 ROS 1 ( Robot Operating System 1 ) 为基础构建 , 是 学术界 和 工业界 最广泛使用的开源自动驾驶平台之一 ;
① Autoware.AI 技术特点
Autoware.AI 有如下特点 :
Autoware.AI 主要 基于 ROS 1 的 Kinetic / Melodic 版本 进行开发构建 ;
采用了模块化设计 :
- 感知模块 Perception
- 定位模块 Localization
- 规划模块 Planning
- 控制模块 Control
支持多种传感器 :
- 激光雷达 LiDAR
- 摄像头
- GNSS/IMU
- 毫米波雷达
- 超声波雷达
使用传统算法为主 :
- 定位算法 : NDT ( Normal Distributions Transform ) 、ICP ;
- 感知算法 : Euclidean Clustering、Ground Plane Filtering、YOLO 等 ;
- 规划算法 : DP ( Dynamic Programming ) + EM ( Elastic Band ) 或 纯状态机 ;
Autoware.AI 开发阶段 适配 Ubuntu14.04 - Indigo、Ubuntu16.04 - Kinetic、Ubuntu18.04 - Melodic 等 Ubuntu Linux 系统版本 ;
② Autoware.AI 优缺点
Autoware.AI 优点 :
- 文档丰富 ;
- 部署简单 : 易于部署在 NVIDIA Jetson、x86 工控机等平台
- 案例多 : 大量高校、研究机构使用 , 教程和案例多 ;
Autoware.AI 缺点 :
- 实时性差 : 不适合车规级量产 ;
- 架构松散 : 模块间耦合度高,难以维护和扩展 ;
- 技术欠债 : 不支持现代软件工程实践 , 如 : 没有 单元测试 ;
③ Autoware.AI 适用场景
Autoware.AI 适用于 对实时性、安全性要求不高的场景 ;
- 学术研究与教学 : 高校 和 科研机构 进行 学术研究 和 教学 , 验证基础算法 , 学习自动驾驶入门 ;
- 低成本原型验证 : 小型团队 开发 低速简易 自动驾驶演示车 , 用来 验证基础功能可行性 , 无需投入过多精力解决 复杂的 系统稳定性问题 ;
- 验证算法可行性 : 验证开发出新算法 , 如 : 目标检测 , SLAM 算法 , 快速验证该算法的可行性 ;
2、Autoware.Core/Universe
① 版本简介
Autoware.Core/Universe 是当前的主流版本 , 基于 ROS 2 构建 , 由 Core 和 Universe 两个模块组成 , 解决了 Autoware.Auto 的开发协作与扩展性问题 ;
- Autoware.Core 继承了 Autoware.Auto 的 稳定化策略 , 代码经过充分测试 , 包含自动驾驶系统所需的传感、计算、驱动等基础核心组件 , 保障系统基础运行的可靠性 ;
- Autoware.Universe 则是 Core 的扩展模块 , 代码质量要求相对宽松 , 方便开发者贡献前沿功能 ;
- 适配 Ubuntu20.04 - Galactic、Ubuntu22.04 - Humble 等 Linux 系统版本 , 兼容性更强 ;
② Autoware.Core/Universe 特点
Autoware.Core/Universe 技术特点 :
- 基于 ROS 2 Humble 框架 ;
- 版本融合 : 融合 Autoware.AI 的功能丰富性 + Autoware.Auto 的架构严谨性 ;
- 模块化架构 : 采用 模块化、可插拔架构 ;
- 强调 开放标准 : 支持 OpenSCENARIO、OpenDRIVE、ASAM OSI 等 ;
- 提供 完整工具链 :
- 高精地图工具 : MapTool , 创建、编辑和验证高精地图(HD Map) 的工具集 ;
- 行为决策工具 : Behavior Planner , 根据交通规则、周围交通参与者状态、高精地图语义,决定自车的宏观驾驶行为 ;
- 轨迹规划工具 : Motion Planner , 负责生成一条安全、平滑、动力学可行的时空轨迹 ;
- 线控控制工具 : Control ( MPC、Pure Pursuit ) , 接收 Motion Planner 生成的参考轨迹 , 计算出 转向角 和 加速度 / 油门 / 刹车指令 , 使车辆精确跟踪轨迹 ;
③ Autoware.Core/Universe 应用场景
Autoware.Core/Universe 应用场景 : 该版本覆盖 从 科研 到 工业级落地 的全场景需求 ;
- Autoware.Core 适合 工业级商业化落地 , 比如自动驾驶出租车、园区无人接驳车、干线物流自动驾驶等对稳定性和安全性要求高的场景 , 可为量产级方案提供稳定的基础架构 ;
- Autoware.Universe 则适配前沿 技术探索 与 定制化开发 , 例如 : 科研机构 测试最新感知融合算法、企业为特殊场景开发 专属规划策略 等 , 开发者可快速将实验性技术集成到系统中验证效果 , 同时其宽松的贡献门槛也适合高校开展创新型科研项目 ;

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐



 26
26 0
0- 0



 已为社区贡献39条内容
已为社区贡献39条内容

所有评论(0)