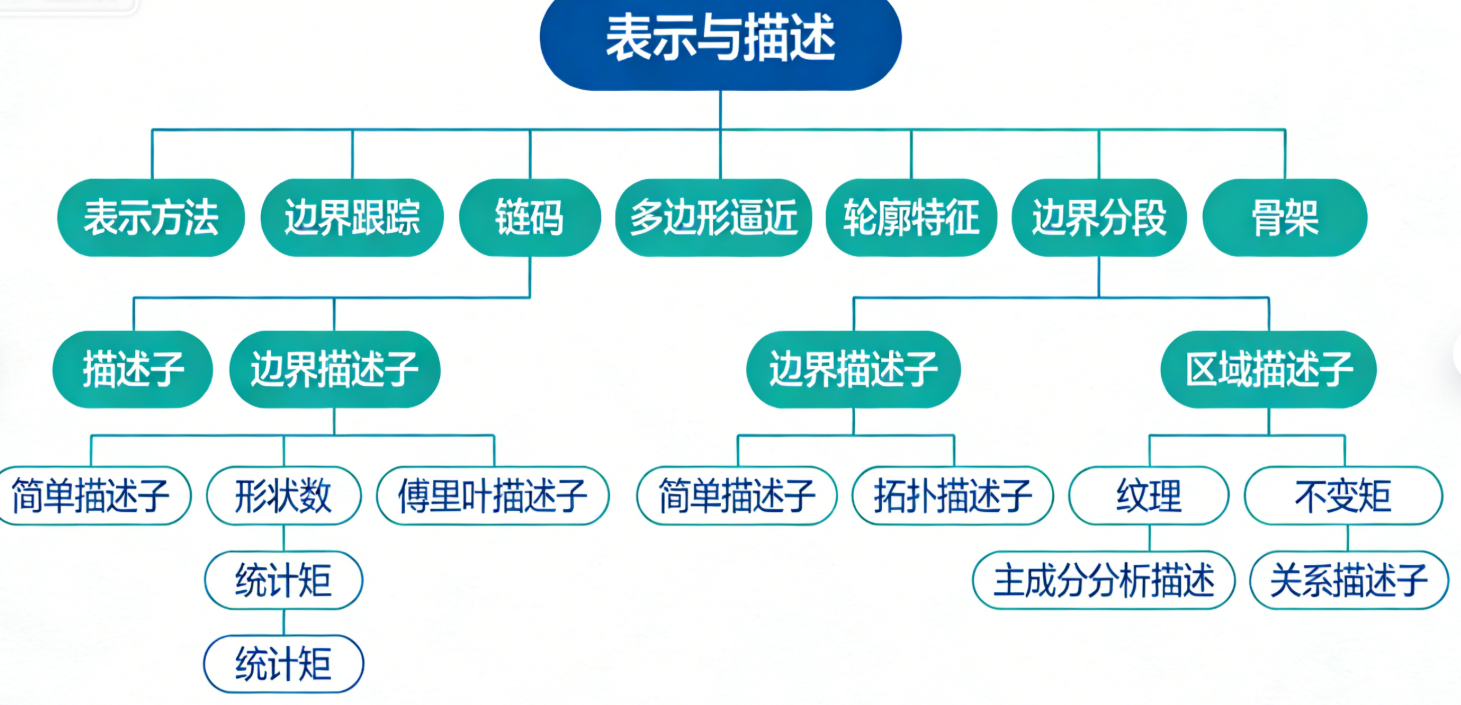
《数字图像处理》第 11 章 - 表示与描述
本文介绍了数字图像处理中表示与描述的核心方法,包括边界跟踪、链码、多边形逼近、骨架提取等表示方法,以及边界描述子、区域描述子、关系描述子等特征提取技术。通过Python代码实现并对比了各种方法的实际效果,如Freeman链码压缩边界数据、傅里叶描述子保持形状特征、Hu矩的平移旋转不变性等。文章还提供了工程应用建议,如简单形状识别推荐使用Hu矩或傅里叶描述子,纹理分析适合灰度共生矩阵。所有案例均附带
前言
在数字图像处理中,完成图像分割后,我们得到了目标区域和边界,但这些原始像素集合难以直接用于后续的分析、识别和分类。第 11 章的表示与描述正是解决这个问题的核心 —— 通过特定的方法将分割后的区域 / 边界用简洁、有意义的形式表示,并提取能反映其本质特征的描述子,让计算机能够 "理解" 图像中目标的形状、结构和属性。
本文将结合完整可运行的 Python 代码,详细讲解数字图像处理中表示与描述的核心知识点,所有案例均附带效果对比图,帮助你直观理解每个概念的实际应用。
11.1 表示方法
表示方法的核心是将图像中目标的边界 / 区域从原始像素形式转换为更简洁、易处理的形式,为后续描述做准备。
11.1.1 边界跟踪
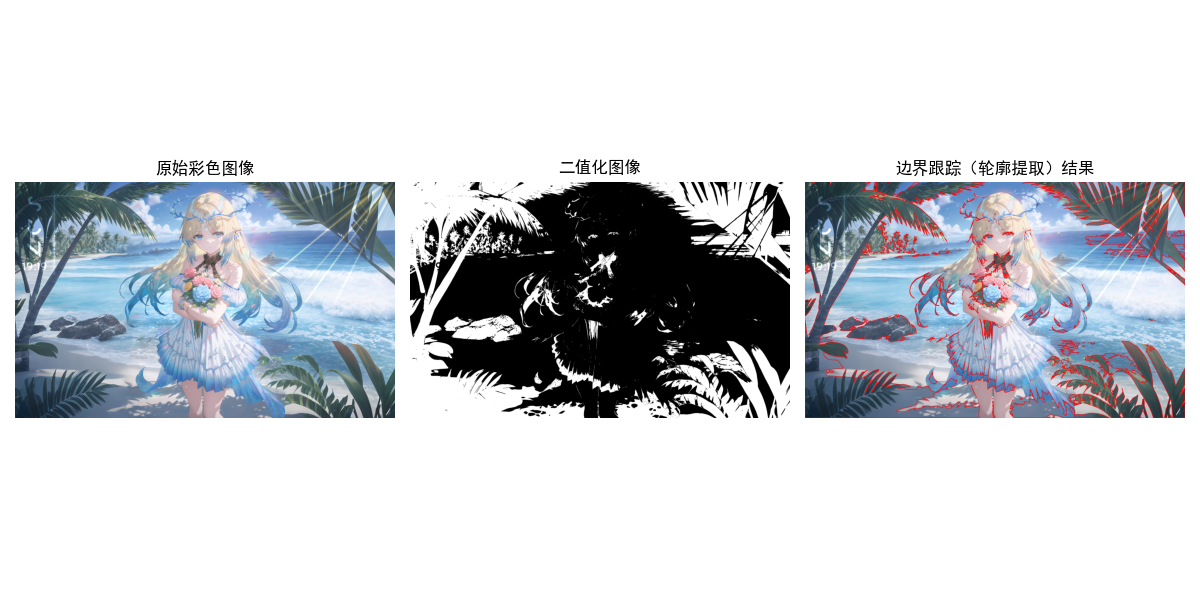
边界跟踪(也叫轮廓提取)是从二值图像中找到目标物体边界像素的过程,OpenCV 中提供了findContours函数实现该功能。
完整代码(边界跟踪)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams['font.sans-serif'] = ['SimHei'] # 黑体
plt.rcParams['axes.unicode_minus'] = False # 解决负号显示问题
def boundary_tracking_demo():
"""边界跟踪(轮廓提取)演示"""
# 1. 读取图像并预处理
# 读取彩色图像
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB) # 转换为RGB格式(适配matplotlib)
# 灰度化+二值化(分割基础)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV) # 二值化(反相)
# 2. 边界跟踪(查找轮廓)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 3. 绘制轮廓
img_contour = img_rgb.copy()
cv2.drawContours(img_contour, contours, -1, (255, 0, 0), 2) # 蓝色绘制轮廓
# 4. 效果对比显示
plt.figure(figsize=(12, 6))
# 原始彩色图
plt.subplot(1, 3, 1)
plt.imshow(img_rgb)
plt.title('原始彩色图像')
plt.axis('off')
# 二值化图像
plt.subplot(1, 3, 2)
plt.imshow(binary, cmap='gray')
plt.title('二值化图像')
plt.axis('off')
# 轮廓跟踪结果
plt.subplot(1, 3, 3)
plt.imshow(img_contour)
plt.title('边界跟踪(轮廓提取)结果')
plt.axis('off')
plt.tight_layout()
plt.show()
# 运行演示
if __name__ == "__main__":
boundary_tracking_demo()
代码说明
- 预处理:先将彩色图转灰度,再二值化(分割出目标区域);
- 边界跟踪核心:
cv2.findContours是 OpenCV 的核心轮廓提取函数,RETR_EXTERNAL表示只提取最外层轮廓,CHAIN_APPROX_SIMPLE用于压缩轮廓点(减少冗余); - 可视化:将原始图、二值图、轮廓结果放在同一窗口对比,直观展示效果。
11.1.2 链码
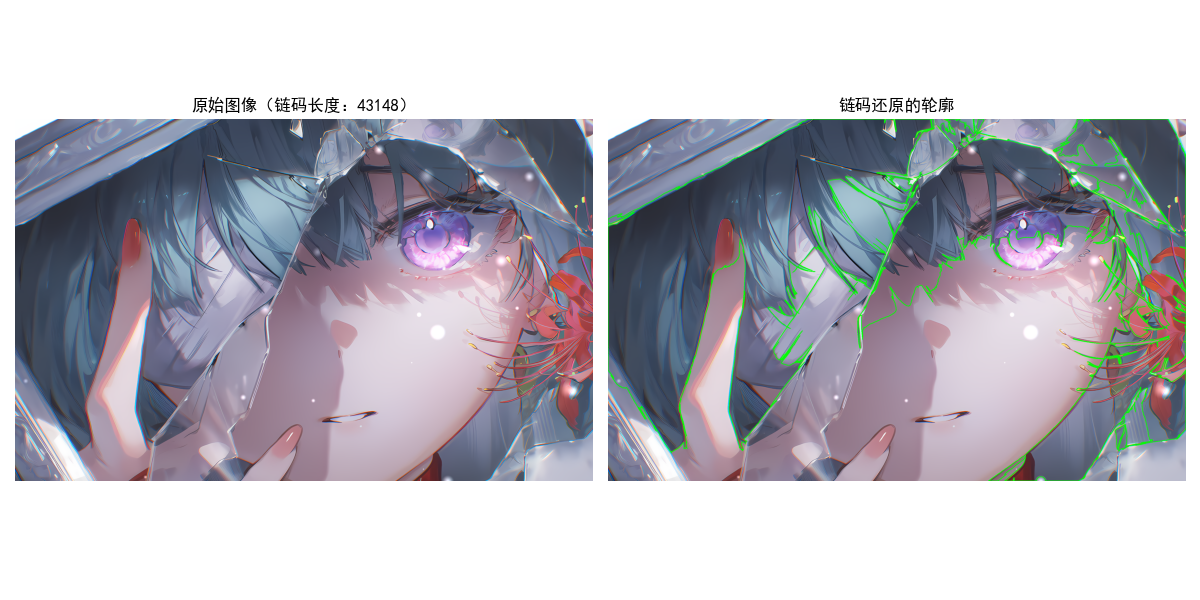
链码(Freeman 链码)是用方向码表示边界点序列的方法,核心是用数字(如 0-7 表示 8 个方向)描述边界的走向,能极大压缩边界数据。
完整代码(链码生成与还原)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 定义8方向Freeman链码的方向向量(上、右上、右、右下、下、左下、左、左上)
DIRECTIONS = [(-1, 0), (-1, 1), (0, 1), (1, 1),
(1, 0), (1, -1), (0, -1), (-1, -1)]
def get_freeman_chaincode(contour):
"""计算轮廓的Freeman链码(8方向)"""
chaincode = []
# 取轮廓的第一个点作为起始点
prev_point = contour[0][0]
for i in range(1, len(contour)):
curr_point = contour[i][0]
# 计算当前点相对于前一个点的偏移
dx = curr_point[0] - prev_point[0]
dy = curr_point[1] - prev_point[1]
# 查找对应的方向码
for idx, (dy_dir, dx_dir) in enumerate(DIRECTIONS):
if dx == dx_dir and dy == dy_dir:
chaincode.append(idx)
break
prev_point = curr_point
return chaincode
def chaincode_demo():
"""链码演示"""
# 1. 读取并预处理图像
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# 取最大的轮廓(假设只有一个目标)
contour = max(contours, key=len)
# 3. 计算链码
chaincode = get_freeman_chaincode(contour)
# 4. 从链码还原轮廓
start_point = contour[0][0]
restored_contour = [start_point]
current_point = start_point
for code in chaincode:
dy, dx = DIRECTIONS[code]
new_point = (current_point[0] + dx, current_point[1] + dy)
restored_contour.append(new_point)
current_point = new_point
# 转换为OpenCV轮廓格式
restored_contour = np.array(restored_contour, dtype=np.int32).reshape(-1, 1, 2)
# 5. 绘制结果
img_chaincode = img_rgb.copy()
cv2.drawContours(img_chaincode, [restored_contour], -1, (0, 255, 0), 2) # 绿色绘制还原的轮廓
# 6. 效果对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img_rgb)
plt.title(f'原始图像(链码长度:{len(chaincode)})')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(img_chaincode)
plt.title('链码还原的轮廓')
plt.axis('off')
print(f"Freeman链码(前20个):{chaincode[:20]}...")
plt.tight_layout()
plt.show()
if __name__ == "__main__":
chaincode_demo()
代码说明
- 方向定义:8 方向链码对应 8 个偏移向量,覆盖所有相邻像素的方向;
- 链码计算:遍历轮廓点,计算相邻点的偏移,匹配对应的方向码;
- 轮廓还原:从起始点出发,根据链码的方向逐步还原轮廓,验证链码的有效性;
- 优势:链码用少量数字表示完整边界,数据量远小于原始轮廓点。
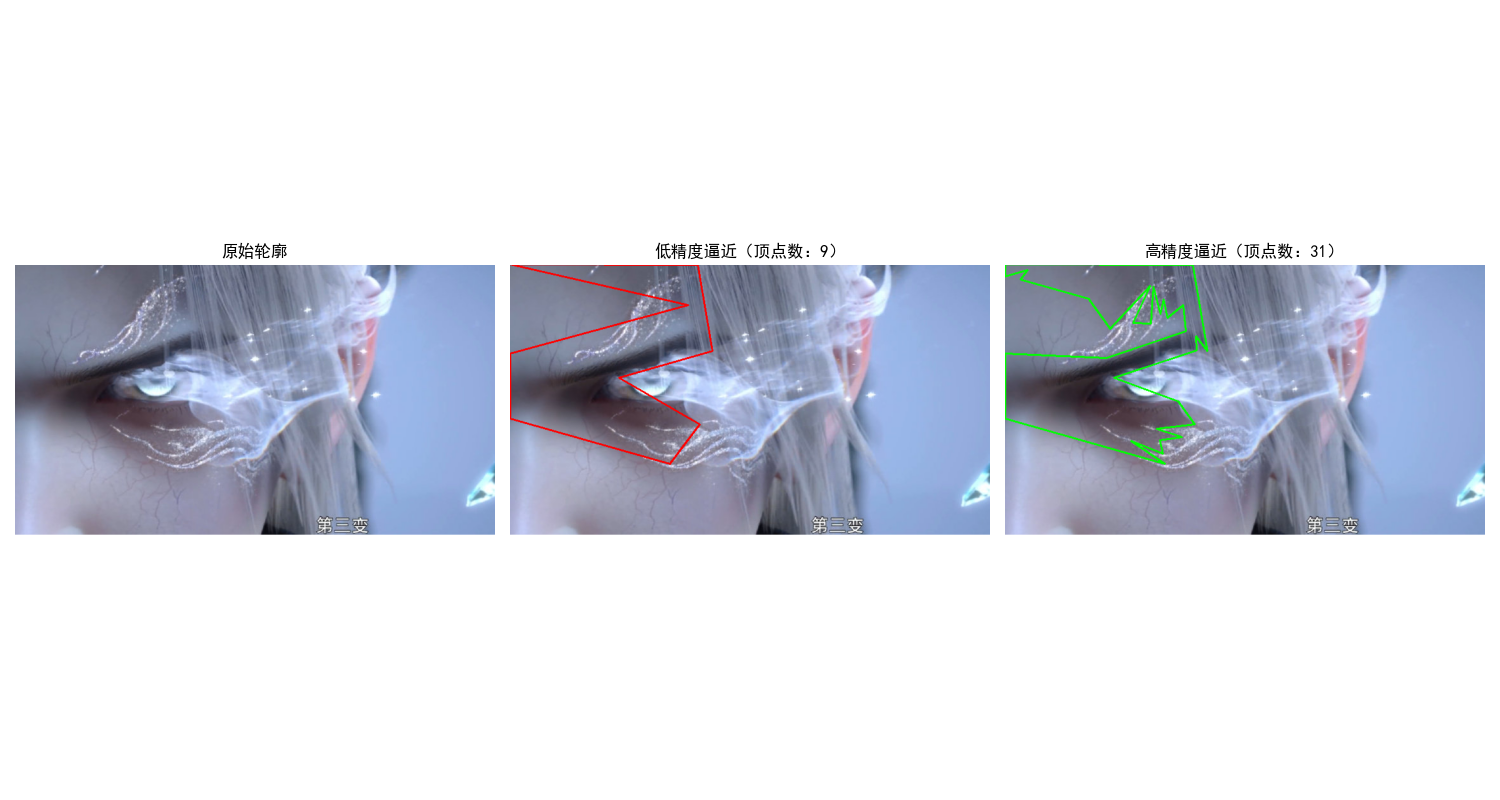
11.1.3 基于最小周长多边形的多边形逼近
多边形逼近是用简单的多边形拟合复杂边界,最小周长多边形(MPP)是其中经典方法,核心是用尽可能少的边逼近边界,同时保证周长最小。
完整代码(多边形逼近)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def polygon_approximation_demo():
"""基于最小周长思想的多边形逼近演示"""
# 1. 读取并预处理图像
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour = max(contours, key=len)
# 3. 多边形逼近(Douglas-Peucker算法,近似MPP思想)
# 计算轮廓周长
perimeter = cv2.arcLength(contour, closed=True)
# 不同精度的逼近(epsilon越小,逼近越精细)
epsilon1 = 0.02 * perimeter # 低精度(少边)
epsilon2 = 0.005 * perimeter # 高精度(多边)
approx1 = cv2.approxPolyDP(contour, epsilon1, closed=True)
approx2 = cv2.approxPolyDP(contour, epsilon2, closed=True)
# 4. 绘制结果
img_approx1 = img_rgb.copy()
img_approx2 = img_rgb.copy()
cv2.drawContours(img_approx1, [approx1], -1, (255, 0, 0), 2) # 蓝色:低精度
cv2.drawContours(img_approx2, [approx2], -1, (0, 255, 0), 2) # 绿色:高精度
# 5. 效果对比
plt.figure(figsize=(15, 5))
plt.subplot(1, 3, 1)
plt.imshow(img_rgb)
plt.title('原始轮廓')
plt.axis('off')
plt.subplot(1, 3, 2)
plt.imshow(img_approx1)
plt.title(f'低精度逼近(顶点数:{len(approx1)})')
plt.axis('off')
plt.subplot(1, 3, 3)
plt.imshow(img_approx2)
plt.title(f'高精度逼近(顶点数:{len(approx2)})')
plt.axis('off')
plt.tight_layout()
plt.show()
if __name__ == "__main__":
polygon_approximation_demo()
代码说明
- 核心函数:
cv2.approxPolyDP是 OpenCV 实现的 Douglas-Peucker 算法,是 MPP 的近似实现; - 精度控制:
epsilon参数(通常为周长的百分比)决定逼近精度,值越小,多边形越接近原始轮廓; - 应用场景:用少量多边形顶点替代大量轮廓点,降低后续计算复杂度。
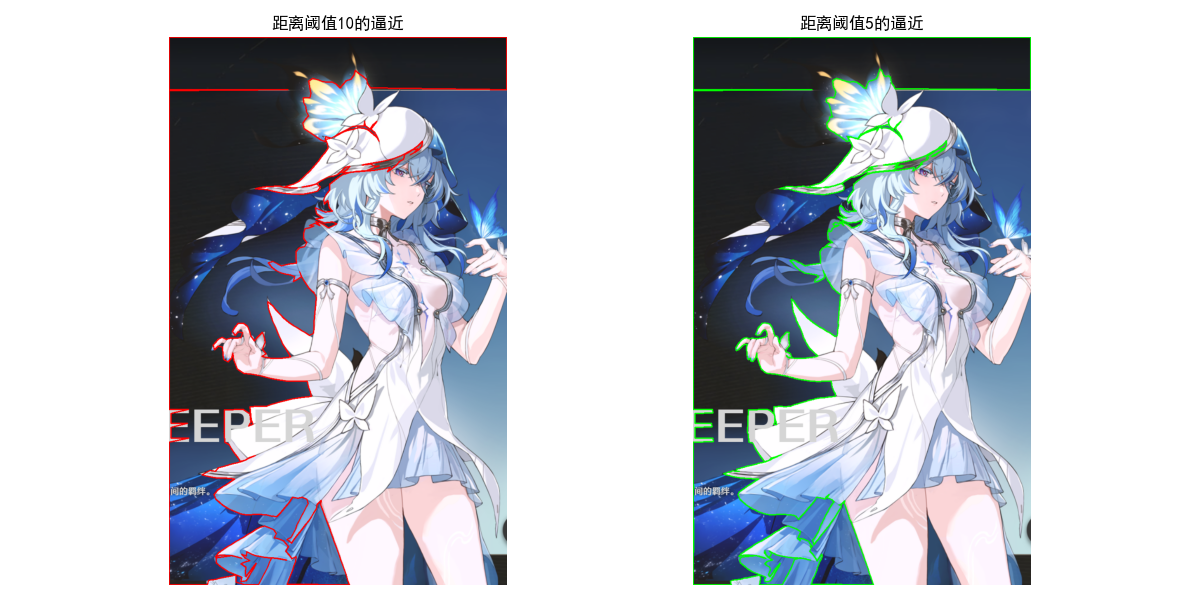
11.1.4 其他多边形逼近方法(简要实现)
除了 MPP,常用的还有基于点集拟合、分治的逼近方法,这里实现简单的基于距离阈值的逼近:
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def distance_based_approximation(contour, threshold):
"""基于距离阈值的多边形逼近"""
if len(contour) < 3:
return contour
approx = [contour[0][0]] # 起始点
prev_point = contour[0][0]
for point in contour[1:]:
curr_point = point[0]
# 计算欧氏距离
dist = np.linalg.norm(curr_point - prev_point)
if dist > threshold:
approx.append(curr_point)
prev_point = curr_point
# 闭合轮廓
approx.append(contour[0][0])
return np.array(approx, dtype=np.int32).reshape(-1, 1, 2)
def other_polygon_approx_demo():
"""其他多边形逼近方法演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour = max(contours, key=len)
# 3. 不同阈值的距离逼近
approx_low = distance_based_approximation(contour, 10)
approx_high = distance_based_approximation(contour, 5)
# 4. 绘制
img_low = img_rgb.copy()
img_high = img_rgb.copy()
cv2.drawContours(img_low, [approx_low], -1, (255, 0, 0), 2)
cv2.drawContours(img_high, [approx_high], -1, (0, 255, 0), 2)
# 5. 对比显示
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img_low)
plt.title('距离阈值10的逼近')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(img_high)
plt.title('距离阈值5的逼近')
plt.axis('off')
plt.tight_layout()
plt.show()
if __name__ == "__main__":
other_polygon_approx_demo()
11.1.5 轮廓特征
轮廓特征是描述轮廓几何属性的基础指标,如面积、周长、外接矩形、凸包等。
完整代码(轮廓特征提取)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def contour_features_demo():
"""轮廓特征提取演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour = max(contours, key=len)
# 3. 计算轮廓特征
area = cv2.contourArea(contour) # 面积
perimeter = cv2.arcLength(contour, closed=True) # 周长
rect = cv2.boundingRect(contour) # 外接矩形 (x,y,w,h)
x, y, w, h = rect
convex_hull = cv2.convexHull(contour) # 凸包
aspect_ratio = float(w) / h # 长宽比
extent = area / (w * h) # 延展度(轮廓面积/外接矩形面积)
# 4. 绘制特征
img_features = img_rgb.copy()
# 绘制外接矩形
cv2.rectangle(img_features, (x, y), (x+w, y+h), (255, 0, 0), 2)
# 绘制凸包
cv2.drawContours(img_features, [convex_hull], -1, (0, 255, 0), 2)
# 5. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_features)
plt.title(f'轮廓特征:面积={area:.0f}, 周长={perimeter:.0f}, 长宽比={aspect_ratio:.2f}')
plt.axis('off')
plt.show()
# 打印详细特征
print("=== 轮廓特征详细信息 ===")
print(f"轮廓面积:{area:.2f} 像素")
print(f"轮廓周长:{perimeter:.2f} 像素")
print(f"外接矩形:x={x}, y={y}, 宽={w}, 高={h}")
print(f"长宽比:{aspect_ratio:.2f}")
print(f"延展度:{extent:.2f}")
if __name__ == "__main__":
contour_features_demo()

11.1.6 边界分段
边界分段是将长边界拆分为多个有意义的子段(如角点、直线段),便于局部特征分析。
完整代码(边界分段)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def boundary_segmentation_demo():
"""边界分段演示(基于角点检测)- 修复版"""
# 1. 读取并预处理
img_path = '../picture/GaoDa.png'
img = cv2.imread(img_path)
if img is None:
print(f"错误:未找到图像文件,请检查路径是否正确!路径:{img_path}")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 优化:自适应二值化(替代固定阈值127,适配不同亮度的图像)
# 如果自适应效果差,可改用:ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
binary = cv2.adaptiveThreshold(
gray, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11, C=2
)
# 2. 提取轮廓(增加轮廓有效性判断)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if len(contours) == 0:
print("错误:未检测到任何轮廓,请检查二值化效果!")
# 显示二值化结果,帮助排查
plt.figure(figsize=(10, 6))
plt.imshow(binary, cmap='gray')
plt.title('二值化结果(无轮廓)')
plt.axis('off')
plt.show()
return
contour = max(contours, key=len)
# 检查轮廓点数量
if len(contour) < 10: # 轮廓点过少,无法检测角点
print(f"警告:轮廓点数量过少(仅{len(contour)}个),无法检测角点!")
return
# 3. 角点检测(优化参数,增加容错)
contour_points = contour.reshape(-1, 2).astype(np.float32)
# 优化参数:降低qualityLevel、减小minDistance,增加maxCorners
corners = cv2.goodFeaturesToTrack(
contour_points,
maxCorners=20, # 最多检测20个角点
qualityLevel=0.001, # 角点质量阈值(降低更易检测)
minDistance=3 # 角点最小间距(减小更易检测)
)
# 4. 容错处理:无角点时的提示
if corners is None:
print("提示:未检测到任何角点,已仅绘制轮廓!")
img_segment = img_rgb.copy()
cv2.drawContours(img_segment, [contour], -1, (0, 0, 255), 1)
plt.figure(figsize=(10, 6))
plt.imshow(img_segment)
plt.title('边界分段(未检测到角点)')
plt.axis('off')
plt.show()
return
# 修复:替换弃用的np.int0为np.intp
corners = np.intp(corners)
# 5. 绘制分段结果
img_segment = img_rgb.copy()
# 绘制原始轮廓
cv2.drawContours(img_segment, [contour], -1, (0, 0, 255), 1)
# 绘制角点(分段点)
for corner in corners:
x, y = corner.ravel()
cv2.circle(img_segment, (x, y), 3, (255, 0, 0), -1) # 蓝色角点
# 6. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_segment)
plt.title(f'边界分段(检测到{len(corners)}个角点/分段点)')
plt.axis('off')
plt.show()
if __name__ == "__main__":
boundary_segmentation_demo()
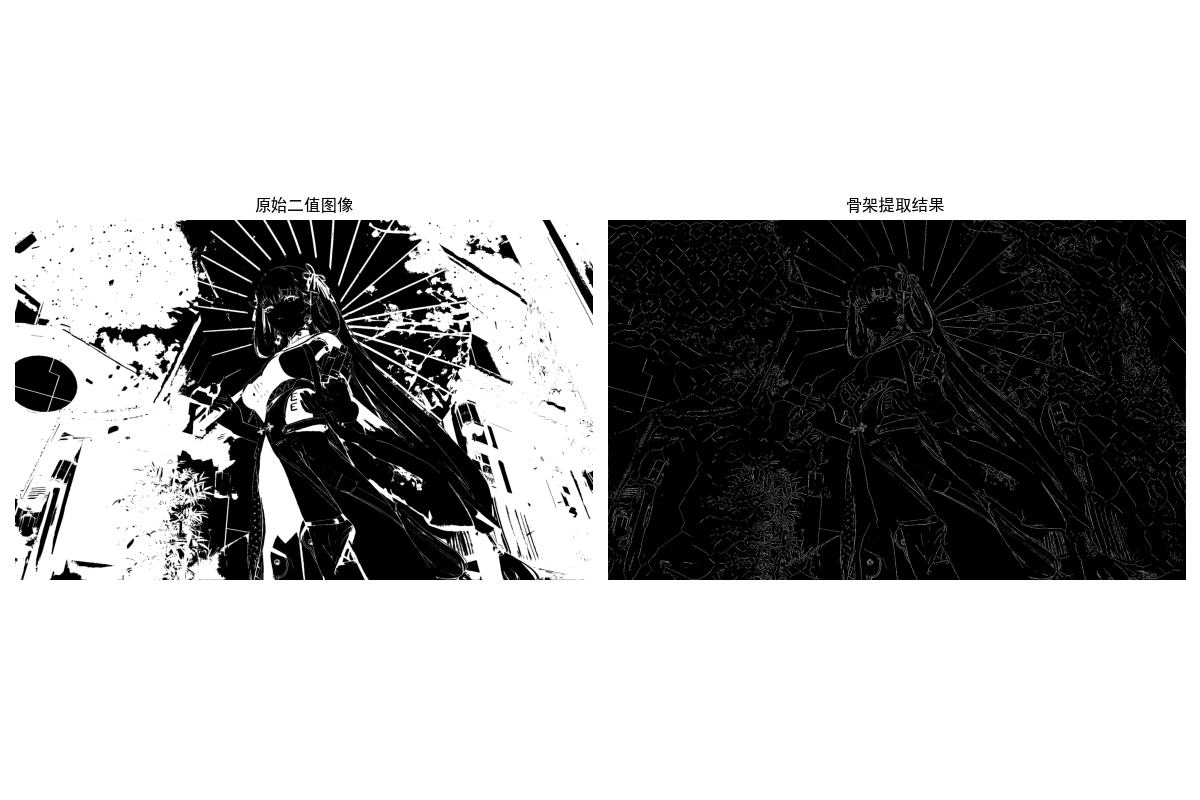
11.1.7 骨架
骨架(细化)是将区域收缩为单像素宽度的中心线,保留区域的拓扑结构,常用于字符识别、指纹识别等。
完整代码(骨架提取)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def skeletonize(image):
"""骨架提取(细化)"""
# 转换为二值图(确保背景为0,前景为255)
size = np.size(image)
skel = np.zeros(image.shape, np.uint8)
ret, img = cv2.threshold(image, 127, 255, 0)
element = cv2.getStructuringElement(cv2.MORPH_CROSS, (3, 3))
done = False
while not done:
# 腐蚀
eroded = cv2.erode(img, element)
# 开运算
temp = cv2.dilate(eroded, element)
temp = cv2.subtract(img, temp)
skel = cv2.bitwise_or(skel, temp)
img = eroded.copy()
# 判断是否所有像素都为0
zeros = size - cv2.countNonZero(img)
if zeros == size:
done = True
return skel
def skeleton_demo():
"""骨架提取演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取骨架
skel = skeletonize(binary)
# 3. 效果对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(binary, cmap='gray')
plt.title('原始二值图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(skel, cmap='gray')
plt.title('骨架提取结果')
plt.axis('off')
plt.tight_layout()
plt.show()
if __name__ == "__main__":
skeleton_demo()
11.2 边界描述子
边界描述子是从边界表示中提取的定量特征,用于区分不同形状的边界,核心是平移、旋转、尺度不变性(尽可能)。
11.2.1 简单描述子
简单边界描述子包括:边界长度、直径、矩形度、曲率等,是最基础的描述子。
完整代码(简单边界描述子)
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 设置matplotlib支持中文显示
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def simple_boundary_descriptors_demo():
"""简单边界描述子演示(优化修复版)"""
# 1. 读取并预处理
img_path = '../picture/KanTeLeiLa.png'
img = cv2.imread(img_path)
if img is None:
print(f"错误:未找到图像文件,请检查路径是否正确!路径:{img_path}")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 优化:替换固定阈值为自适应二值化(适配不同图像)
# 若效果不佳,可改用大津法:ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)
binary = cv2.adaptiveThreshold(
gray, 255,
cv2.ADAPTIVE_THRESH_GAUSSIAN_C,
cv2.THRESH_BINARY_INV,
blockSize=11, C=2
)
# 2. 提取轮廓(增加鲁棒性校验)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
if len(contours) == 0:
print("错误:未检测到任何轮廓,请检查二值化效果!")
# 显示二值化结果辅助排查
plt.figure(figsize=(10, 6))
plt.imshow(binary, cmap='gray')
plt.title('二值化结果(无轮廓)')
plt.axis('off')
plt.show()
return
contour = max(contours, key=len)
# 3. 计算简单描述子
# 3.1 边界长度(周长)
length = cv2.arcLength(contour, closed=True)
# 3.2 边界直径(最远两点距离)- 优化:替换双重循环为向量化计算,提升效率
contour_points = contour.reshape(-1, 2).astype(np.float32)
if len(contour_points) < 2:
diameter = 0
else:
# 用scipy的pdist计算成对距离(若未安装scipy,可保留原循环,仅优化校验)
try:
from scipy.spatial.distance import pdist
dists = pdist(contour_points)
diameter = np.max(dists)
except ImportError:
# 备用方案:原循环+提前终止(减少计算量)
dists = []
max_dist = 0
for i in range(len(contour_points)):
for j in range(i + 1, len(contour_points)):
dist = np.linalg.norm(contour_points[i] - contour_points[j])
if dist > max_dist:
max_dist = dist
diameter = max_dist
# 3.3 矩形度(轮廓面积/最小外接矩形面积)
area = cv2.contourArea(contour)
rect = cv2.minAreaRect(contour)
rect_w, rect_h = rect[1]
rect_area = rect_w * rect_h
rectangularity = area / rect_area if rect_area > 0 else 0
# 3.4 圆形度(4π*面积/周长²)- 增加分母非零校验
circularity = (4 * np.pi * area) / (length ** 2) if (length > 1e-6 and area > 0) else 0
# 4. 绘制最小外接矩形 - 修复:替换弃用的np.int0为np.intp
box = cv2.boxPoints(rect)
box = np.intp(box) # 核心修复:消除弃用警告
img_descriptors = img_rgb.copy()
cv2.drawContours(img_descriptors, [box], 0, (0, 255, 0), 2)
# 额外:绘制轮廓(便于对比)
cv2.drawContours(img_descriptors, [contour], -1, (255, 0, 0), 1)
# 5. 显示结果(增加二值化对比图)
plt.figure(figsize=(15, 6))
plt.subplot(1, 2, 1)
plt.imshow(binary, cmap='gray')
plt.title('二值化图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(img_descriptors)
plt.title(f'边界描述子可视化\n圆形度={circularity:.2f}, 矩形度={rectangularity:.2f}')
plt.axis('off')
plt.tight_layout()
plt.show()
# 打印描述子(格式化输出更清晰)
print("=== 简单边界描述子 ===")
print(f"边界长度(周长):{length:.2f} 像素")
print(f"边界直径(最远点距离):{diameter:.2f} 像素")
print(f"轮廓面积:{area:.2f} 像素²")
print(f"最小外接矩形面积:{rect_area:.2f} 像素²")
print(f"矩形度(面积/外接矩形面积):{rectangularity:.2f}")
print(f"圆形度(4π*面积/周长²):{circularity:.2f}")
if __name__ == "__main__":
simple_boundary_descriptors_demo()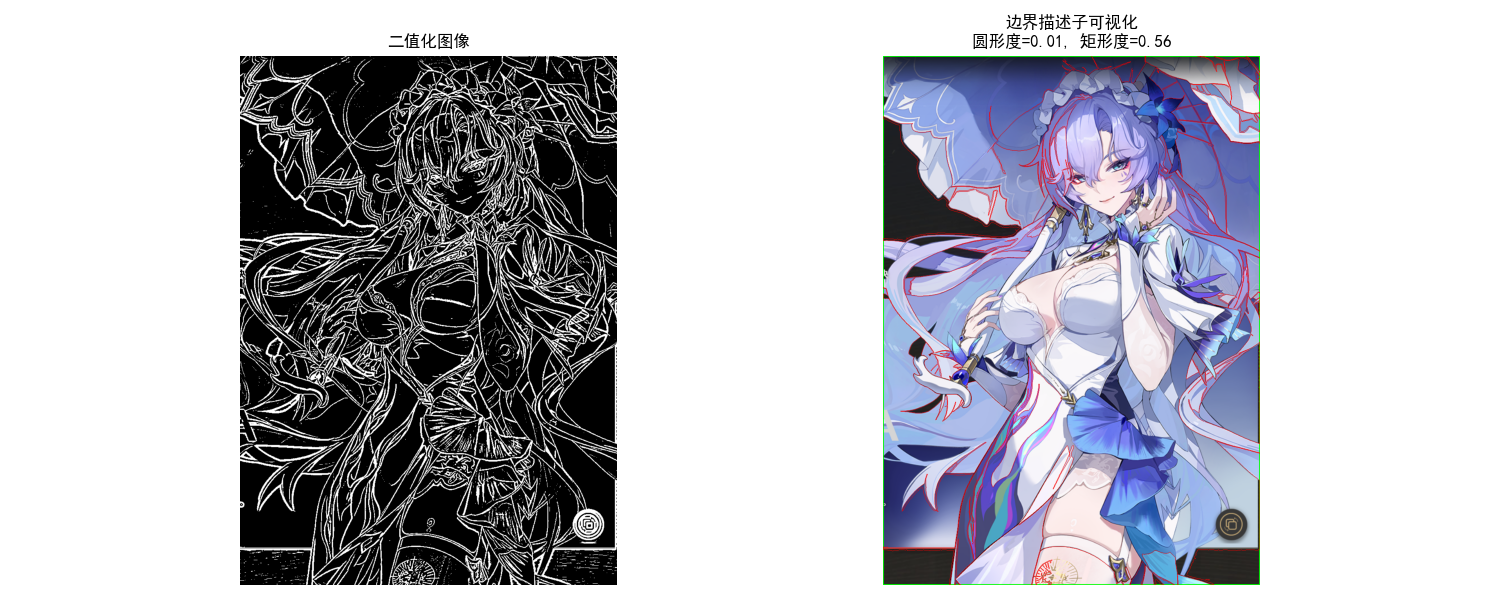
11.2.2 形状数
形状数是基于链码的归一化描述子,具有平移、旋转不变性,核心是最小差分链码。
完整代码(形状数)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
# 8方向链码方向向量
DIRECTIONS = [(-1, 0), (-1, 1), (0, 1), (1, 1),
(1, 0), (1, -1), (0, -1), (-1, -1)]
def get_chaincode(contour):
"""获取轮廓的Freeman链码"""
chaincode = []
prev_point = contour[0][0]
for i in range(1, len(contour)):
curr_point = contour[i][0]
dx = curr_point[0] - prev_point[0]
dy = curr_point[1] - prev_point[1]
for idx, (dy_dir, dx_dir) in enumerate(DIRECTIONS):
if dx == dx_dir and dy == dy_dir:
chaincode.append(idx)
break
prev_point = curr_point
return chaincode
def get_shape_number(chaincode):
"""计算形状数(最小差分链码)"""
# 计算差分链码
diff_chain = [(chaincode[i] - chaincode[i-1]) % 8 for i in range(1, len(chaincode))]
diff_chain.append((chaincode[0] - chaincode[-1]) % 8)
# 找到最小循环移位的差分链码(形状数)
min_diff = diff_chain.copy()
for i in range(1, len(diff_chain)):
shifted = diff_chain[i:] + diff_chain[:i]
if shifted < min_diff:
min_diff = shifted
return min_diff
def shape_number_demo():
"""形状数演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
contour = max(contours, key=len)
# 3. 计算链码和形状数
chaincode = get_chaincode(contour)
shape_number = get_shape_number(chaincode)
# 4. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_rgb)
plt.title('形状数提取演示')
plt.axis('off')
plt.show()
# 打印结果
print("=== 形状数分析 ===")
print(f"原始链码(前20个):{chaincode[:20]}...")
print(f"形状数(前20个):{shape_number[:20]}...")
print(f"形状数阶数:{len(shape_number)}")
if __name__ == "__main__":
shape_number_demo()
11.2.3 傅里叶描述子
傅里叶描述子(FD)是基于边界点的傅里叶变换提取的描述子,具有平移、旋转、尺度不变性,是最常用的边界描述子之一。
完整代码(傅里叶描述子)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def fourier_descriptors(contour, num_coeffs=10):
"""计算轮廓的傅里叶描述子(归一化,保留前num_coeffs个系数)"""
# 将轮廓转换为复数序列
contour_points = contour.reshape(-1, 2)
z = contour_points[:, 0] + 1j * contour_points[:, 1]
# 傅里叶变换
f = np.fft.fft(z)
# 归一化(消除平移、旋转、尺度影响)
# 1. 消除尺度:除以第一个系数的模
f_normalized = f / np.abs(f[0])
# 2. 消除旋转:除以第一个系数的相位
f_normalized = f_normalized / np.exp(1j * np.angle(f_normalized[0]))
# 3. 只保留前num_coeffs个系数(低频,主要特征)
fd = f_normalized[:num_coeffs]
return fd, f
def reconstruct_contour(fd, original_length):
"""从傅里叶描述子还原轮廓"""
# 补零恢复长度
f_recon = np.zeros(original_length, dtype=np.complex128)
f_recon[:len(fd)] = fd
# 共轭对称
f_recon[-len(fd)+1:] = np.conj(fd[1:][::-1])
# 逆傅里叶变换
z_recon = np.fft.ifft(f_recon)
recon_contour = np.column_stack((np.real(z_recon), np.imag(z_recon))).astype(np.int32)
recon_contour = recon_contour.reshape(-1, 1, 2)
return recon_contour
def fourier_descriptors_demo():
"""傅里叶描述子演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
contour = max(contours, key=len)
original_length = len(contour)
# 3. 计算傅里叶描述子
fd, f = fourier_descriptors(contour, num_coeffs=10)
# 4. 从描述子还原轮廓
recon_contour = reconstruct_contour(fd, original_length)
# 5. 绘制结果
img_fd = img_rgb.copy()
cv2.drawContours(img_fd, [recon_contour], -1, (0, 255, 0), 2)
# 6. 效果对比
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img_rgb)
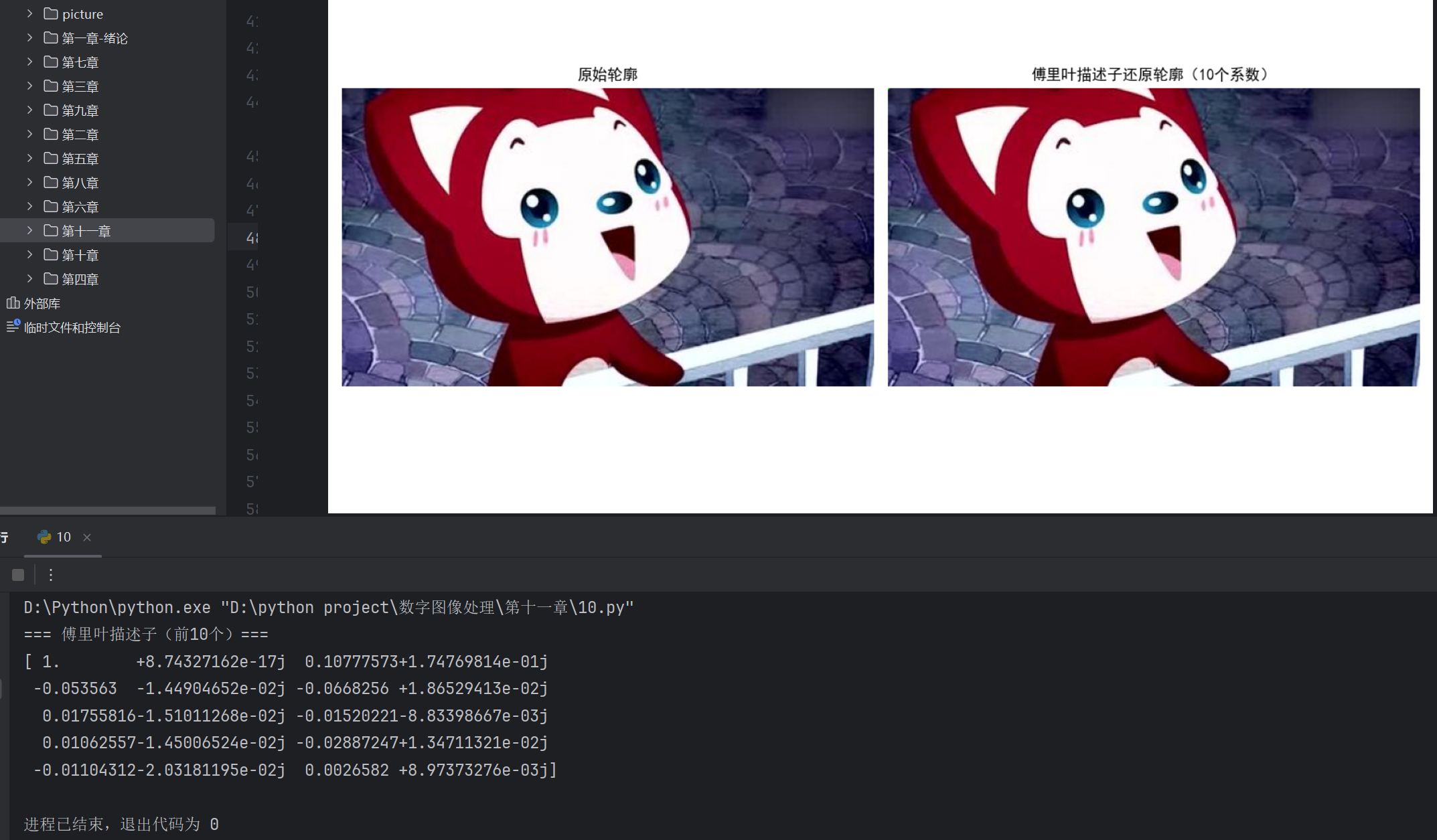
plt.title('原始轮廓')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(img_fd)
plt.title('傅里叶描述子还原轮廓(10个系数)')
plt.axis('off')
plt.tight_layout()
plt.show()
# 打印傅里叶描述子
print("=== 傅里叶描述子(前10个)===")
print(fd)
if __name__ == "__main__":
fourier_descriptors_demo()
11.2.4 统计矩
统计矩(如均值、方差、偏度、峰度)可用于描述边界点的分布特征,是简单有效的统计型描述子。
完整代码(统计矩)
import cv2
import numpy as np
import scipy.stats as stats
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def statistical_moments_demo():
"""边界的统计矩描述子演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour = max(contours, key=len)
contour_points = contour.reshape(-1, 2)
# 3. 计算统计矩
# 分离x、y坐标
x = contour_points[:, 0]
y = contour_points[:, 1]
# 一阶矩(均值)
mean_x = np.mean(x)
mean_y = np.mean(y)
# 二阶矩(方差)
var_x = np.var(x)
var_y = np.var(y)
# 三阶矩(偏度)
skew_x = stats.skew(x)
skew_y = stats.skew(y)
# 四阶矩(峰度)
kurt_x = stats.kurtosis(x)
kurt_y = stats.kurtosis(y)
# 4. 绘制均值点
img_moments = img_rgb.copy()
cv2.circle(img_moments, (int(mean_x), int(mean_y)), 5, (255, 0, 0), -1)
# 5. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_moments)
plt.title(f'边界点均值位置(红色点):({mean_x:.1f}, {mean_y:.1f})')
plt.axis('off')
plt.show()
# 打印统计矩
print("=== 边界点统计矩 ===")
print(f"X坐标 - 均值:{mean_x:.2f}, 方差:{var_x:.2f}, 偏度:{skew_x:.2f}, 峰度:{kurt_x:.2f}")
print(f"Y坐标 - 均值:{mean_y:.2f}, 方差:{var_y:.2f}, 偏度:{skew_y:.2f}, 峰度:{kurt_y:.2f}")
if __name__ == "__main__":
statistical_moments_demo()
11.3 区域描述子
区域描述子直接从目标区域(而非边界)提取特征,更全面地反映目标的属性。
11.3.1 简单描述子
区域简单描述子包括:面积、重心、灰度均值、纹理均值等,是区域最基础的特征。
完整代码(区域简单描述子)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def simple_region_descriptors_demo():
"""区域简单描述子演示"""
# 1. 读取图像
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 2. 分割区域(二值化)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 提取掩码(前景为1,背景为0)
mask = binary / 255
# 3. 计算区域描述子
# 1. 区域面积
area = cv2.countNonZero(binary)
# 2. 重心
moments = cv2.moments(binary)
cx = moments['m10'] / moments['m00'] if moments['m00'] > 0 else 0
cy = moments['m01'] / moments['m00'] if moments['m00'] > 0 else 0
# 3. 灰度均值
mean_gray = np.mean(gray[binary == 255])
# 4. 灰度标准差
std_gray = np.std(gray[binary == 255])
# 5. 填充率(区域面积/外接矩形面积)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
contour = max(contours, key=len)
x, y, w, h = cv2.boundingRect(contour)
fill_ratio = area / (w * h) if (w * h) > 0 else 0
# 4. 绘制重心和外接矩形
img_descriptors = img_rgb.copy()
cv2.rectangle(img_descriptors, (x, y), (x+w, y+h), (255, 0, 0), 2)
cv2.circle(img_descriptors, (int(cx), int(cy)), 5, (0, 255, 0), -1)
# 5. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_descriptors)
plt.title(f'重心:({cx:.1f}, {cy:.1f}),填充率:{fill_ratio:.2f}')
plt.axis('off')
plt.show()
# 打印描述子
print("=== 区域简单描述子 ===")
print(f"区域面积:{area} 像素")
print(f"重心坐标:({cx:.2f}, {cy:.2f})")
print(f"区域灰度均值:{mean_gray:.2f}")
print(f"区域灰度标准差:{std_gray:.2f}")
print(f"填充率:{fill_ratio:.2f}")
if __name__ == "__main__":
simple_region_descriptors_demo()

11.3.2 拓扑描述子
拓扑描述子描述区域的连通性、孔洞数等拓扑属性,具有平移、旋转、尺度不变性。
完整代码(拓扑描述子)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def topological_descriptors_demo():
"""拓扑描述子演示(连通域、孔洞数)"""
# 1. 读取并预处理(建议使用带孔洞的图像,如圆环)
img = cv2.imread('test_shape_with_hole.jpg')
if img is None:
print("请确保test_shape_with_hole.jpg文件存在于当前目录(建议使用带孔洞的图像)!")
# 生成一个带孔洞的测试图像
img = np.zeros((300, 300, 3), dtype=np.uint8)
cv2.circle(img, (150, 150), 100, (255, 255, 255), -1)
cv2.circle(img, (150, 150), 50, (0, 0, 0), -1)
img_rgb = img.copy()
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 2. 计算拓扑描述子
# 1. 连通域数量(使用RETR_CCOMP检索所有轮廓,包括孔洞)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_CCOMP, cv2.CHAIN_APPROX_SIMPLE)
# 统计连通域和孔洞数
num_regions = 0 # 连通域数
num_holes = 0 # 孔洞数
for i in range(len(hierarchy[0])):
# hierarchy格式:[Next, Previous, First_Child, Parent]
if hierarchy[0][i][3] == -1:
# 没有父节点,是外部轮廓(连通域)
num_regions += 1
else:
# 有父节点,是内部轮廓(孔洞)
num_holes += 1
# 2. 欧拉数(连通域数 - 孔洞数)
euler_number = num_regions - num_holes
# 3. 绘制轮廓(外部轮廓红色,孔洞轮廓绿色)
img_topology = img_rgb.copy()
for i, cnt in enumerate(contours):
if hierarchy[0][i][3] == -1:
cv2.drawContours(img_topology, [cnt], -1, (255, 0, 0), 2) # 红色:外部轮廓
else:
cv2.drawContours(img_topology, [cnt], -1, (0, 255, 0), 2) # 绿色:孔洞轮廓
# 4. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_topology)
plt.title(f'连通域数:{num_regions}, 孔洞数:{num_holes}, 欧拉数:{euler_number}')
plt.axis('off')
plt.show()
# 打印拓扑描述子
print("=== 拓扑描述子 ===")
print(f"连通域数量:{num_regions}")
print(f"孔洞数量:{num_holes}")
print(f"欧拉数:{euler_number}")
if __name__ == "__main__":
topological_descriptors_demo()

11.3.3 纹理
纹理描述子用于描述区域的灰度分布规律,常用的有灰度共生矩阵(GLCM)、LBP 等。
完整代码(纹理描述子)
import cv2
import numpy as np
from skimage.feature import graycomatrix, graycoprops
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def texture_descriptors_demo():
"""纹理描述子演示(灰度共生矩阵)"""
# 1. 读取图像
img = cv2.imread('test_texture.jpg')
if img is None:
print("请确保test_texture.jpg文件存在于当前目录!")
# 生成测试纹理图像
img = np.random.randint(0, 255, (300, 300, 3), dtype=np.uint8)
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 2. 计算灰度共生矩阵(GLCM)
# 参数:图像、距离、角度、灰度级、是否对称、是否归一化
glcm = graycomatrix(gray, distances=[5], angles=[0, np.pi/4, np.pi/2, 3*np.pi/4],
levels=256, symmetric=True, normed=True)
# 3. 提取纹理特征
contrast = graycoprops(glcm, 'contrast') # 对比度
dissimilarity = graycoprops(glcm, 'dissimilarity') # 相异性
homogeneity = graycoprops(glcm, 'homogeneity') # 同质性
energy = graycoprops(glcm, 'energy') # 能量
correlation = graycoprops(glcm, 'correlation') # 相关性
# 4. 显示结果
plt.figure(figsize=(12, 8))
plt.subplot(2, 1, 1)
plt.imshow(img_rgb)
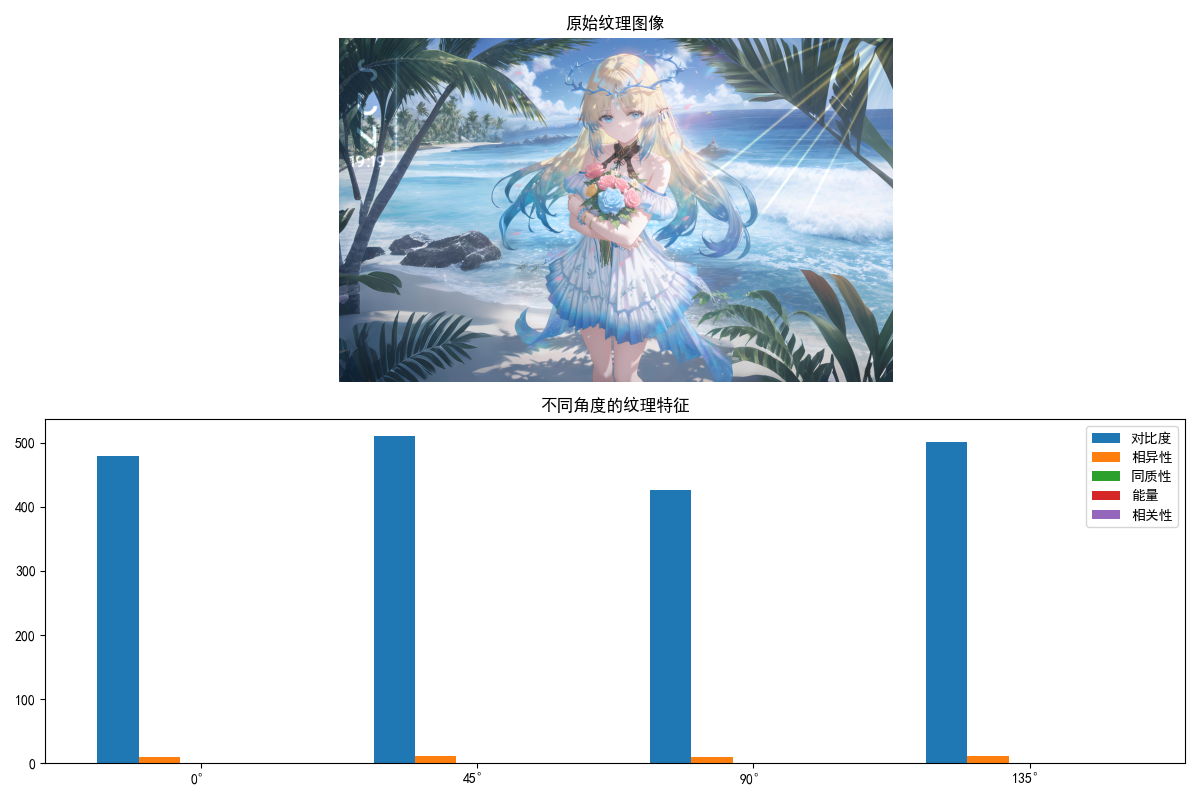
plt.title('原始纹理图像')
plt.axis('off')
plt.subplot(2, 1, 2)
# 绘制不同角度的纹理特征
angles = ['0°', '45°', '90°', '135°']
x = np.arange(len(angles))
width = 0.15
plt.bar(x - 2*width, contrast[0], width, label='对比度')
plt.bar(x - width, dissimilarity[0], width, label='相异性')
plt.bar(x, homogeneity[0], width, label='同质性')
plt.bar(x + width, energy[0], width, label='能量')
plt.bar(x + 2*width, correlation[0], width, label='相关性')
plt.xticks(x, angles)
plt.title('不同角度的纹理特征')
plt.legend()
plt.tight_layout()
plt.show()
# 打印纹理特征
print("=== 纹理描述子(灰度共生矩阵)===")
print(f"对比度(各角度):{contrast[0]}")
print(f"相异性(各角度):{dissimilarity[0]}")
print(f"同质性(各角度):{homogeneity[0]}")
print(f"能量(各角度):{energy[0]}")
print(f"相关性(各角度):{correlation[0]}")
if __name__ == "__main__":
texture_descriptors_demo()
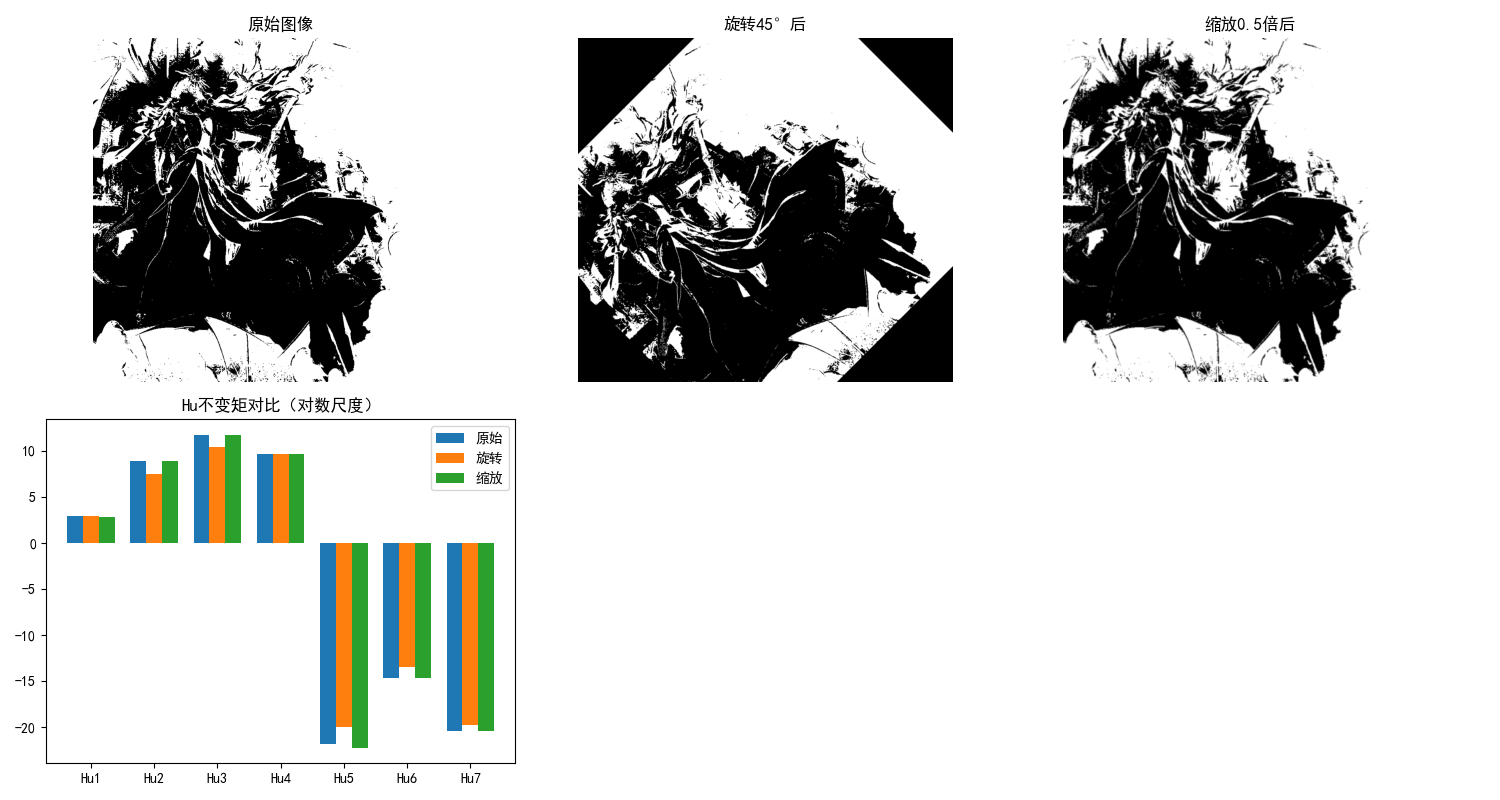
11.3.4 不变矩
不变矩(Hu 矩)是具有平移、旋转、尺度不变性的区域描述子,是模式识别中经典的特征。
完整代码(不变矩)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def hu_moments_demo():
"""不变矩(Hu矩)演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 计算Hu不变矩
moments = cv2.moments(binary)
hu_moments = cv2.HuMoments(moments)
# 取对数(便于观察,Hu矩值通常很小)
hu_moments_log = -np.sign(hu_moments) * np.log10(np.abs(hu_moments))
# 3. 生成变换后的图像(验证不变性)
# 旋转45度
rows, cols = binary.shape
M_rot = cv2.getRotationMatrix2D((cols/2, rows/2), 45, 1)
binary_rot = cv2.warpAffine(binary, M_rot, (cols, rows))
# 缩放0.5倍
M_scale = cv2.resize(binary, (0,0), fx=0.5, fy=0.5)
binary_scale = cv2.resize(M_scale, (cols, rows))
# 计算变换后的Hu矩
hu_rot = cv2.HuMoments(cv2.moments(binary_rot))
hu_rot_log = -np.sign(hu_rot) * np.log10(np.abs(hu_rot))
hu_scale = cv2.HuMoments(cv2.moments(binary_scale))
hu_scale_log = -np.sign(hu_scale) * np.log10(np.abs(hu_scale))
# 4. 效果对比
plt.figure(figsize=(15, 8))
# 原始图像
plt.subplot(2, 3, 1)
plt.imshow(binary, cmap='gray')
plt.title('原始图像')
plt.axis('off')
# 旋转后图像
plt.subplot(2, 3, 2)
plt.imshow(binary_rot, cmap='gray')
plt.title('旋转45°后')
plt.axis('off')
# 缩放后图像
plt.subplot(2, 3, 3)
plt.imshow(binary_scale, cmap='gray')
plt.title('缩放0.5倍后')
plt.axis('off')
# Hu矩对比
plt.subplot(2, 3, 4)
moments_idx = [f'Hu{i+1}' for i in range(7)]
x = np.arange(len(moments_idx))
width = 0.25
plt.bar(x - width, hu_moments_log.ravel(), width, label='原始')
plt.bar(x, hu_rot_log.ravel(), width, label='旋转')
plt.bar(x + width, hu_scale_log.ravel(), width, label='缩放')
plt.xticks(x, moments_idx)
plt.title('Hu不变矩对比(对数尺度)')
plt.legend()
plt.tight_layout()
plt.show()
# 打印Hu矩
print("=== Hu不变矩(原始图像)===")
print(hu_moments_log.ravel())
print("\n=== Hu不变矩(旋转后)===")
print(hu_rot_log.ravel())
print("\n=== Hu不变矩(缩放后)===")
print(hu_scale_log.ravel())
if __name__ == "__main__":
hu_moments_demo()
11.4 基于主成分分析的描述方法
主成分分析(PCA)通过降维提取区域 / 边界的主要特征,是数据压缩和特征提取的经典方法。
完整代码(PCA 描述)
import cv2
import numpy as np
from sklearn.decomposition import PCA
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def pca_description_demo():
"""基于PCA的描述方法演示"""
# 1. 读取并预处理
img = cv2.imread('test_shape.jpg')
if img is None:
print("请确保test_shape.jpg文件存在于当前目录!")
return
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV)
# 2. 提取轮廓点
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
contour = max(contours, key=len)
points = contour.reshape(-1, 2).astype(np.float32)
# 3. 中心化(减去均值)
mean = np.mean(points, axis=0)
points_centered = points - mean
# 4. PCA降维
pca = PCA(n_components=2)
points_pca = pca.fit_transform(points_centered)
# 5. 还原数据(验证降维效果)
points_recon = pca.inverse_transform(points_pca) + mean
points_recon = points_recon.astype(np.int32).reshape(-1, 1, 2)
# 6. 绘制PCA主方向
img_pca = img_rgb.copy()
# 绘制原始轮廓
cv2.drawContours(img_pca, [contour], -1, (0, 0, 255), 1)
# 绘制还原轮廓
cv2.drawContours(img_pca, [points_recon], -1, (0, 255, 0), 2)
# 绘制主成分方向
mean_int = mean.astype(np.int32)
# 第一主成分
pc1 = mean_int + pca.components_[0] * 50
cv2.line(img_pca, tuple(mean_int), tuple(pc1.astype(np.int32)), (255, 0, 0), 2)
# 第二主成分
pc2 = mean_int + pca.components_[1] * 50
cv2.line(img_pca, tuple(mean_int), tuple(pc2.astype(np.int32)), (255, 255, 0), 2)
# 7. 显示结果
plt.figure(figsize=(12, 6))
plt.subplot(1, 2, 1)
plt.imshow(img_rgb)
plt.title('原始图像')
plt.axis('off')
plt.subplot(1, 2, 2)
plt.imshow(img_pca)
plt.title('PCA降维还原(蓝色:主成分1,黄色:主成分2)')
plt.axis('off')
plt.tight_layout()
plt.show()
# 打印PCA结果
print("=== PCA描述子 ===")
print(f"主成分方差贡献率:{pca.explained_variance_ratio_}")
print(f"累计方差贡献率:{np.sum(pca.explained_variance_ratio_):.2f}")
print(f"主成分矩阵:\n{pca.components_}")
if __name__ == "__main__":
pca_description_demo()

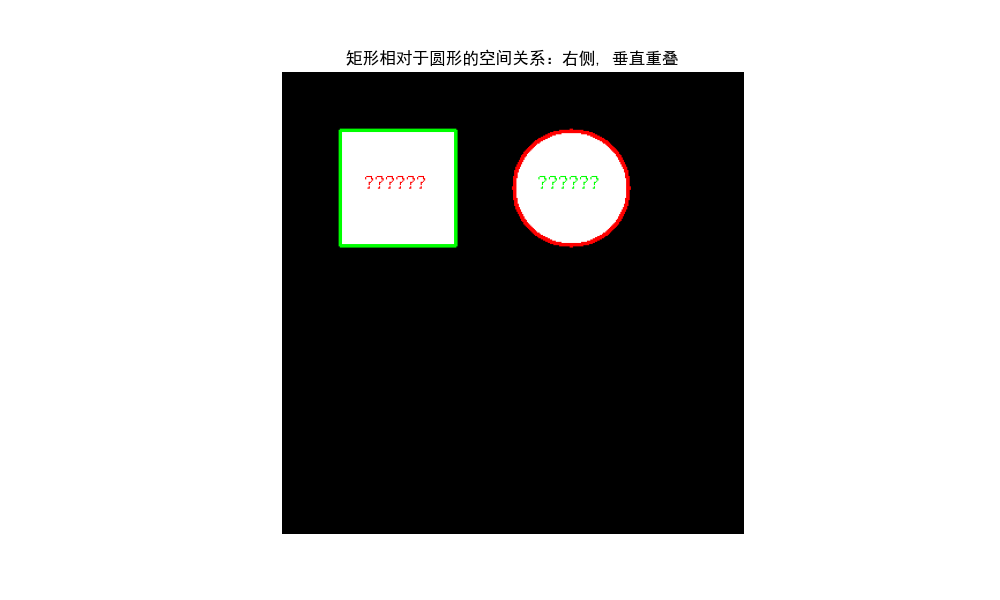
11.5 关系描述子
关系描述子通过描述目标各部分之间的空间关系(如上下、左右、包含)来表征目标,常用的有语义网络、句法描述等。
完整代码(关系描述子)
import cv2
import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
def spatial_relationship(contour1, contour2):
"""判断两个轮廓的空间关系"""
# 计算轮廓的包围盒
x1, y1, w1, h1 = cv2.boundingRect(contour1)
x2, y2, w2, h2 = cv2.boundingRect(contour2)
# 计算中心坐标
cx1 = x1 + w1/2
cy1 = y1 + h1/2
cx2 = x2 + w2/2
cy2 = y2 + h2/2
# 判断关系
relations = []
# 水平关系
if cx1 < cx2 - w2/2:
relations.append("左侧")
elif cx1 > cx2 + w2/2:
relations.append("右侧")
else:
relations.append("水平重叠")
# 垂直关系
if cy1 < cy2 - h2/2:
relations.append("上方")
elif cy1 > cy2 + h2/2:
relations.append("下方")
else:
relations.append("垂直重叠")
# 包含关系
if (x1 < x2 and y1 < y2 and x1 + w1 > x2 + w2 and y1 + h1 > y2 + h2):
relations.append("包含")
elif (x2 < x1 and y2 < y1 and x2 + w2 > x1 + w1 and y2 + h2 > y1 + h1):
relations.append("被包含")
return relations
def relational_descriptors_demo():
"""关系描述子演示"""
# 1. 生成包含两个形状的测试图像
img = np.zeros((400, 400, 3), dtype=np.uint8)
# 绘制矩形
cv2.rectangle(img, (50, 50), (150, 150), (255, 255, 255), -1)
# 绘制圆形
cv2.circle(img, (250, 100), 50, (255, 255, 255), -1)
img_rgb = img.copy()
# 2. 预处理
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 3. 分析空间关系(假设两个轮廓)
if len(contours) >= 2:
contour1 = contours[0] # 矩形
contour2 = contours[1] # 圆形
relations = spatial_relationship(contour1, contour2)
# 4. 绘制结果
img_relation = img_rgb.copy()
cv2.drawContours(img_relation, [contour1], -1, (255, 0, 0), 2)
cv2.drawContours(img_relation, [contour2], -1, (0, 255, 0), 2)
# 添加文字说明
cv2.putText(img_relation, '矩形', (70, 100), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 1)
cv2.putText(img_relation, '圆形', (220, 100), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)
# 5. 显示结果
plt.figure(figsize=(10, 6))
plt.imshow(img_relation)
plt.title(f'矩形相对于圆形的空间关系:{", ".join(relations)}')
plt.axis('off')
plt.show()
# 打印关系描述
print("=== 关系描述子 ===")
print(f"矩形相对于圆形的空间关系:{', '.join(relations)}")
else:
print("图像中至少需要两个目标轮廓!")
if __name__ == "__main__":
relational_descriptors_demo()
小结
核心知识点总结
- 表示方法:核心是将原始边界 / 区域转换为简洁形式(如链码、多边形、骨架),为描述做准备,边界跟踪是所有表示方法的基础;
- 描述子分类:边界描述子(傅里叶描述子、形状数)侧重轮廓特征,区域描述子(Hu 矩、纹理)侧重区域整体属性,优秀的描述子应具备平移 / 旋转 / 尺度不变性;
- 实用技巧:PCA 可用于特征降维,拓扑描述子(欧拉数)适合描述连通性,关系描述子适合多目标空间关系分析。
工程应用建议
- 简单形状识别优先使用Hu 不变矩或傅里叶描述子,计算高效且鲁棒性强;
- 纹理丰富的图像优先使用灰度共生矩阵(GLCM) 提取纹理特征;
- 多目标场景可结合拓扑描述子和关系描述子分析目标间的结构关系。
注意事项
- 运行代码前需安装依赖:
pip install opencv-python numpy matplotlib scikit-image scikit-learn; - 建议准备测试图像(如
test_shape.jpg、test_texture.jpg),或使用代码中自动生成的测试图像;

助力广东及东莞地区开发者,代码托管、在线学习与竞赛、技术交流与分享、资源共享、职业发展,成为松山湖开发者首选的工作与学习平台
更多推荐



 17
17 0
0- 0



 已为社区贡献8条内容
已为社区贡献8条内容

所有评论(0)